 |
|
МЕНЮФестивали и конкурсы Семинары Издания О МОДНТ Приглашения Поздравляем НАУЧНЫЕ РАБОТЫ |
Дипломная работа: Исследование систем измерения траекторных параметров самолета при посадке на основе эффекта МессбауэраДипломная работа: Исследование систем измерения траекторных параметров самолета при посадке на основе эффекта МессбауэраВВЕДЕНИЕ Для осуществления управляемого полета в приземном или космическом пространстве на борту летательного аппарата (ЛА) необходимо иметь системы ориентации и навигации, определяющие такие навигационные параметры, как курсовой угол (курс), углы крена, тангажа, величину и направление вектора скорости полета, направление на цель и расстояние. В настоящее время практически не существует Л А, ориентация и навигация которых осуществлялась бы без гироскопических приборов. Это объясняется тем, что при пилотировании и управлении Л А на их борту необходимо с высокой точностью моделировать какие либо опорные (базовые) направления, принимаемые за начало отсчета, относительно которых определялось бы положение объекта. Такими направлениями могут быть, например, направление вертикали места, плоскости меридиана, главной ортодромии и др. Реализация этих базовых направлений на неподвижном относительно Земли основании не представляет особых трудностей. Однако эти так называемые простейшие указатели направлений мало пригодны для применения на подвижных объектах. Гироскопические приборы благодаря своим специфическим свойствам в большинстве случаев меньше подвержены внешним возмущениям и позволяют получать более достоверную информацию о параметрах движения Л А. Для выполнения автоматического полета по заданному маршруту и для решения других задач навигации необходима высокая точность выдачи текущего гироскопического курса полета. В связи с этим важное значение приобретает съем информации с гироскопических систем ориентации и навигации (ГСОиН). От того, с какой точностью производится автоматический съем информации гироскопического курса, зависит и точность счисления текущих координат места ЛА, точность полета по линии заданного пути, точность выхода на намеченный пункт маршрута. Требования к точности съема информации с ГСОиН в настоящее время возрастает в связи с появлением и разработкой имеющих дрейф 0.001 о/ч лазерных, с электростатическим подвесом и т.д. гироскопов для навигационных систем. Насколько важна высокая точность измерения курса ГСОиН достаточно хорошо иллюстрирует следующий пример. При поступлении на эксплуатацию самолета ИЛ-62, оборудованного курсовой системой ТКС-П с дрейфом гироскопов 0,5 о/ч и доплеровской системой с ошибкой измерения угла сноса над сушей 0.33°, метод ориентации курсовой системы на этом самолете обеспечивал точность 2.5°, что составляет на 600-километровой дистанции при полете от пункта маршрута А к Б отклонение 6x28 км. Метод ориентации КС на самолете ТУ-154 обеспечивал точность 0.25°, что позволило повысить точность навигации примерно в 3 раза при использовании аналогичного навигационного оборудования; в конце 600-километровой дистанции предельные значения отклонений составляли 4.7x8 км. Значит, при повышении точности автономного счисления координат происходит сокращение траектории полета, что приводит к экономии летного времени. Проанализируем источники ошибок измерения путевого угла. Показания курса выдерживаются основным и контрольным гироагрегатом и индицируются на независимых друг от друга указателях штурмана. Смысл такого построения заключается в следующем. Перед полетом оба гироагрегата выставляют на одно и то же исходное значение гироскопического курса, которое, в общем случае, может не совпадать с истинным (магнитным) курсом ЛА. Эта операция (начальная выставка) обеспечивает привязку гироскопического курса к магнитному (истинному) меридиану, который определяется магнитным (истинным) путевым углом ортодромии МПУо, отсчитывается от меридиана места выставки до направления главной ортодромии. Если направление ортодромии выбрано совпадающим с направлением меридиана в месте вылета, то начальный магнитный путевой угол ортодромииМПУо, отсчитанный от "начального" магнитного меридиана, при выставке курсовой системы равен нулю. Разность истинных путевых углов ортодромии при изменении долготы полета равна углу сходимости меридианов Е. Выставку гироагрегатов, как правило, производят от истинного (начального) меридиана места выставки. Тогда при движении по выбранной ортодромии должен выдерживаться ортодромический курс (при отсутствии сноса), численно равный МПУо. В этом случае значение ортодромического курса (ОК) отличается от истинного курса (И К) летательного аппарата на величину Е. Сравнение измеренной в полете разности ОК и ИК с расчетной величиной Е позволяет контролировать точность гироскопического курса. После выставки основного и контрольного гироагрегатов на указателях системы устанавливаются одинаковые показания курса. В полете расхождение показаний курса по указателям штурмана на величину более 1 ° за час означает (при равномерном прямолинейном полете), что гироскопы курсовой системы работают с завышенными уходами. Включать коррекцию по ортодромическому курсу в полете рекомендуется лишь при рассогласовании более 1°-2° с астродатчиком и 2°-3° с магнитным датчиком. Если обнаружатся чрезмерно большие ошибки (более 2-5 о/ч) от ухода гироскопа основного гироагрегата, которые могут быть вызваны какой-либо частичной неисправностью гироскопа, то основной гироскоп не корректируется, а потребители и основной указатель штурмана переключаются на контрольный гироагрегат. Исследования по определению точности ориентации ГСОиН в азимуте проводились на основе анализа источников ошибок измерения путевого угла (ПУ). Установлено, что погрешность при измерении путевого угла находится по формуле:
Где
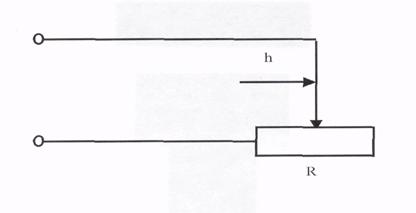
Тема данного дипломного проекта “Исследование систем измерения траекторных параметров самолетов при посадке на основе эффекта Мессбауэра”. В данном дипломном проекте будут проанализированы известные методы и средства съема информации с ГСОиН. На основе эффекта Мессбауэра разработано устройство съема информации, которое позволяет существенно уменьшить дрейф гироскопа (что, в свою очередь, позволяет обеспечить высокую точность измерения курса) и обладает чрезвычайной чувствительностью измерений при изменении положения ЛА в пространстве. 1. СПЕЦИАЛЬНЫЙ РАЗДЕЛ 1.1 Обзор с представлением особенностей элементов и устройств съема информации с ГСОиН, анализы методов съема (достоинства и недостатки) В качестве устройств съема информации с гироскопических систем ориентации и навигации могут применяться самые разнообразные датчики угловых перемещений: 1) потенциометрические; 2) емкостные (конденсаторы); 3) индуктивные (сельсины, индуктосины, импульсины); 4) СКТ, СКВТ; 5) оптические датчики; Съем информации осуществляется датчиками углов следующим образом: при изменении угловых положений объекта датчики гироскопической системы изменяют относительное расположение своих элементов, жестко связанных с гироскопом, и происходит преобразование перемещения в сигнал удобный для обработки и обобщения. Перейдем к подробному изложению методов измерения информации и описанию преобразователей. Метод сопротивления, потенциометры. В методах сопротивления используется зависимость электрического сопротивления резисторов от различных нсэлектрических величин. Сопротивление Rрезистора зависит от многих факторов, в частности, от давления, температуры окружающей среды, деформации и длины резистора. Рассмотрим метод, основанный на изменении омического сопротивления проволочного реостата при перемещении скользящего контакта под действием измеряемой величины (рисунок1.1).Входной величиной преобразователя является угловое линейное перемещение движка, выходной-изменение его сопротивления. Реостат состоит из каркаса, на который намотан провод, изготовленный из материала с высоким удельным сопротивлением, и токосъемного движка. Движок касается провода. Для обеспечения электрического контакта с подвижным движком в месте касания обмотка зачищается от изоляции. Обмотка делается обычно из манганина, константана, фехраля. При перемещении контакта величина сопротивления будет изменяться. Если Х-координата контакта, то:
где
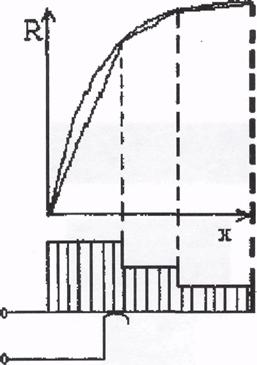
Коэффициент а, связывающий механическую величину-перемещение и электрическую сопротивление, называется коэффициентом электромеханической связи реостатного преобразователя. Очевидно, чем больше П, тем большей чувствительностью обладает преобразователь. Но слишком большое увеличение а не всегда целесообразно, так как эффективная работа преобразователя определяется не только величиной сопротивления, но и протекающим по сопротивлению током. В измерительной технике требуются реостатные преобразователи как с линейной так и с нелинейной функцией преобразования. Одним из способов построения преобразователей с нелинейной функцией преобразования является использование каркаса с переменной непрерывно меняющейся высотой. Изготовление такого каркаса более сложно, чем изготовление каркаса с постоянной высотой, Для упрощения технологии прибегают к кусочно-линейной аппроксимации нелинейной функции преобразования. Для каждого интервала перемещения движка Ax, на котором аппроксимирующая функция линейна, высота каркаса постоянна. Каркас преобразователя получается ступенчатым, число ступеней равно числу интервалов кусочно-линейной аппроксимации (рисунок 1.2)
Рисунок 1.1 Схема реостатного преобразователя. R-омическое сопротивление; h-перемещение движка.
Рисунок 1.2 Зависимость сопротивления от переменной высоты каркаса реостатного преобразователя
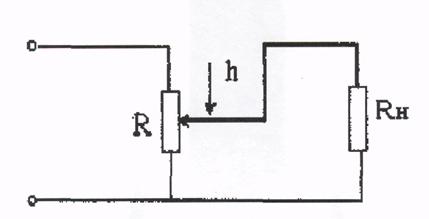
Рисунок 1.3 Схема потенциометра R-сопротивление; h - перемещение движка; Rn – сопротивление нагрузки; H – сопротивление; i – перемещение движка. Одним из примеров реостатного преобразователя является потенциометр (рисунок 1.3). Напряжение с движка потенциометра подается на нагрузку. Учитывая технологию изготовления потенциометры бывают проволочные и проводниковые. Источником питания могут служить как переменный так и постоянный ток. Достоинства и недостатки реостатных преобразователей. Реостатные преобразователи обладают большой чувствительностью, возможностью работы без усиления и отсутствием реакции электрической части на механическую. К недостаткам следует отнести непостоянство контакта между движком и резистором. При измерении переменных величин, при переходе движка с одного витка на другой он "подскакивает", возникает пульсирующая сила, которая может нарушить контакт. Это погрешность дискретности, обусловленная скачкообразным изменением сопротивления АЛ при переходе движка. Для перемещения контакта по резистору необходима сравнительно большая сила. Поэтому в реостатном преобразователе возникает сила трения, которая вызывает случайные гистерезисные изменения силы и момента, необходимых для перемещения движка по обмотке. При этом может возникнуть погрешность системы, предшествующейпреобразователю. Сила трения увеличивает износ обмотки и контактирующей поверхности движка. Погрешность потенциометра при съеме информации с ГСОиН составляет 30'. Емкостной метод, конденсаторы. Известно, что емкость С конденсатора зависит:
где е- диэлектрическая постоянная диэлектрика; d-расстояние между электродами; В частности емкость плоского конденсатора с двумя электродами определяется выражением:
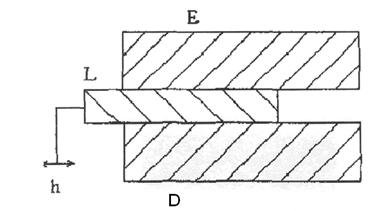
мессбауэр самолет навигация гироскопическая система Изменение емкости С конденсатора согласно формуле (1.2) можно осуществить путем изменения расстояния dмежду электродами, эффективной площади Sэлектродов и диэлектрической постоянной s диэлектрика. Для измерения неэлектрических величин можно использовать также изменения диэлектрических потерь в конденсаторе. В простейшем случае емкостной преобразователь состоит из двух параллельных пластин, разделенных воздушным диэлектриком, причем перемещение одной из пластин вызывает изменение емкости конденсатора. На (рисунок 1.4) показано принципиальное устройство емкостного преобразователя. На (рисунок 1.5) показан емкостной преобразователь в котором между двух неподвижных электродов перемещается подвижный диэлектрик. Так как изменение емкости конденсатора является однозначной функцией перемещения, то по изменению емкости можно судить о величине перемещения.
Рисунок 1.4 Схема емкостного преобразователя Е – неподвижный электрод; D – подвижный электрод
Рисунок 1.5 Схема емкостного преобразователя с подвижным диэлектриком. E, D – неподвижные электроды; L–подвижный диэлектрик; h – перемещение диэлектрика. Для увеличения чувствительности емкостного датчика следует уменьшать зазор между пластинами, однако при этом возможно замыкание пластин. Но если заполнить часть зазора диэлектриком с большой диэлектрической постоянной, чувствительность датчика возрастет и при тех же перемещения подвижной пластины можно будет получить значительно большее изменение емкости. Емкостные датчики
обладают малой мощностью, особенно на низких частотах. Обычно емкость датчика
составляет С=100-300 мкмкф, а изменение не превышает 10% от общей
емкости. Если, например, к емкостному датчику с С=100мкмкф приложено
напряжение u=5в частотой
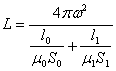
Так как мощность измерителя должна быть во много раз меньше мощности датчика, то такой измеритель должен обладать высокой чувствительностью, но это не вполне возможно, поэтому емкостные датчики, как правило, работают на повышенных частотах и с применением усилителей. Для преобразования изменения емкости в соответствующее изменение силы тока, напряжения или частоты применяются различные электрические схемы: резонансные, мостовые, электростатические. В резонансных схемах емкость датчика является элементом резонансного контура и изменение емкости вызывает изменение резонансной частоты, что в результате приводит к изменению частоты или амплитуды тока, протекающего по контуру. К числу преимуществ резонансных схем следует отнести высокую чувствительность и линейную зависимость выходной электрической величины и емкости. Однако в этих схемах трудно получить постоянную настройку, и следовательно, трудно обеспечить постоянство нуля прибора. В мостовых схемах емкость датчика включается в одно или два плеча и служит переменным элементом моста, Недостатком мостовых схем для преобразования емкости является трудность достижения равновесия моста из-за несинусоидального питающего напряжения и неточного выполнения условий равновесия. В электростатических схемах переменная емкость датчика используется для модуляции постоянного напряжения. Падение напряжения на переменной емкостиподается на сетку усилительной лампы с большим входным сопротивлением. Подобные схемы удовлетворительно работают только при измерении быстро изменяющихся неэлектрических величин. Достоинства и недостатки емкостных преобразователей. Емкостные преобразователи имеют ряд преимуществ: высокую чувствительность, возможность измерения как весьма малых, так и больших перемещений и деформаций, большую точность. К недостаткам следует отнести необходимость применять для питания схем ток повышенной частоты и усилители, а так же погрешности от паразитных емкостей, посторонних электрических полей. Погрешность емкостного преобразователя при съеме информации с ГСОиН 5. Индуктивный метод, индуктивные преобразователи. В электрических методах измерения, основанных на измерении индуктивности L, используется свойство катушки изменять свое реактивное (индуктивное) сопротивление при изменении некоторых ее параметров, определяющих величину индуктивности. Для получения возможно большой индуктивности катушка малых габаритов выполняется с сердечником из ферромагнитного материала. Выражение для определения индуктивности такой катушки имеет вид:
где L0, S0 - величина и площадь воздушного зазора; L1, S1 - длина средней линии и площадь сечения сердечника;
Изменение индуктивности Lсогласно (1.4) можно осуществлять
путем изменения числа витков, Если катушка, индуктивность которой изменяется пропорционально измеряемой неэлектрической величине, включена в электрическую цепь, го по изменению силы тока в цепи или напряжения на клеммах прибора можно судить об этой величине. При применении индуктивных преобразователей для измерения медленно меняющихся величин для их питания можно обойтись переменным током промышленной частоты. При измерении индуктивными преобразователями величин, изменяющихся с высокой частотой, необходимо выполнить два условия: 1) частота тока питающего преобразователь, должна быть в несколько раз выше частоты изменения измеряемой величины, 2) собственные частоты элементов (обычно якорей дои мембран), служащих для преобразования измеряемой неэлектрической величины в изменение индуктивности, должны быть значительно выше наивысшей частоты измеряемой величины. Принципиальная схема индуктивного преобразователя представлена на (рисунке 1.6). На железном сердечнике 1 намотана катушка 2. Если изменить воздушный зазор q посредством перемещения якоря 3, то коэффициент самоиндукции L катушки 2 будет изменяться, вследствие чего сила тока i, протекающего по катушке, так же будет изменяться. Таким образом, каждому значению перемещения h и величины зазора q будет соответствовать определенное значение коэффициента самоиндукции L, а следовательно и определенное значение силы тока i. |
Приглашения09.12.2013 - 16.12.2013 Международный конкурс хореографического искусства в рамках Международного фестиваля искусств «РОЖДЕСТВЕНСКАЯ АНДОРРА»09.12.2013 - 16.12.2013 Международный конкурс хорового искусства в АНДОРРЕ «РОЖДЕСТВЕНСКАЯ АНДОРРА»
|
 (1.3)
(1.3)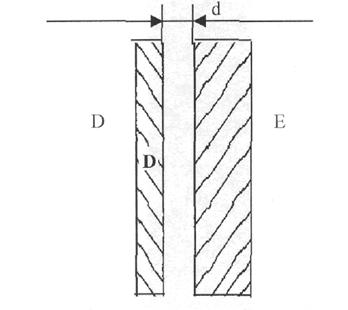


Copyright © 2012 г.
При использовании материалов - ссылка на сайт обязательна.