 |
|
МЕНЮФестивали и конкурсы Семинары Издания О МОДНТ Приглашения Поздравляем НАУЧНЫЕ РАБОТЫ |
Курсовая работа: Расчет продолжительности пуска и торможения электропривода
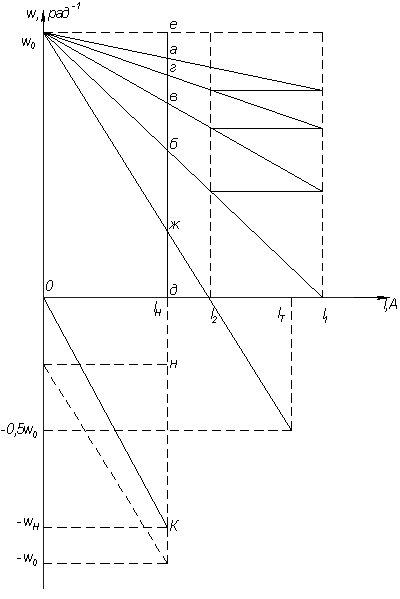
Рис. 1.2 Графическое определение пусковых и тормозных сопротивлений двигателя постоянного тока независимого (параллельного) возбуждения Расчет тормозных сопротивлений Для определения величины
сопротивления, которое необходимо включить в цепь якоря электродвигателя при
тормозном спуске груза с торможением противовключением, на пусковую диаграмму
нанести точку с координатами Сопротивление, включаемое в цепь
якоря при динамическом торможении, начало которого задано номинальным током Задача № 2. Расчет и построение механических характеристик асинхронного двигателя и производственных механизмов. Приведение моментов сопротивления и моментов инерции к скорости вращения вала двигателя. Определение времени переходного процесса. Энергетика переходных процессов. Устойчивость работы привода Для системы «трехфазный асинхронный электродвигатель - рабочая машина»: 1. Рассчитать и построить естественную механическую характеристику для асинхронного короткозамкнутого двигателя по пяти точкам (пусковая, минимальная, критическая, номинальная, холостого хода) и по уравнению Клосса. 2. Рассчитать приведенную к скорости вращения вала двигателя механическую характеристику рабочей машины и построить ее в одних координатных осях с характеристикой двигателя. 3. Определить приведенный к скорости вращения вала двигателя момент инерции системы «электропривод - рабочая машина». 4. Графическим и графоаналитическим методом определить время разгона двигателя с нагрузкой при номинальном напряжении питания. 5. Рассчитать потери энергии в асинхронном двигателе при пуске системы с нагрузкой, без нагрузки и при торможении противовключением без нагрузки. 6. Оценить условия запуска электродвигателя
с нагрузкой при снижении питающего напряжения на 7. Для трехфазного асинхронного двигателя с короткозамкнутым ротором определить величину активного или реактивного сопротивления, которое необходимо включить в цепь статора для снижения пускового тока в два раза по сравнению с током при прямом пуске. Исходные данные по вариантам приведены в таблице 2.1.
Построение механической характеристики асинхронного двигателя Механическую характеристику
асинхронного двигателя
где Формула Клосса при скольжениях
1-я точка
2-я точка 3-я точка 4-я точка 5-я точка Данные расчета механической
характеристики
Таблица 2.2 Данные к построению механической характеристики асинхронного электродвигателя по пяти точкам
Таблица 2.3 Данные к построению механической характеристики асинхронного электродвигателя по уравнению Клосса
Построение механической характеристики рабочей машины Приведенный момент вращения рабочей
машины к валу двигателя
где
Таблица 2.4 Соответствие показателя степени группам механизмов
В соответствии с выбранным рабочим
механизмом определить значения
Таблица 2.5 Значения величин
коэффициента
Задаваясь значением скорости вращения
Таблица 2.6
На основании расчетных данных
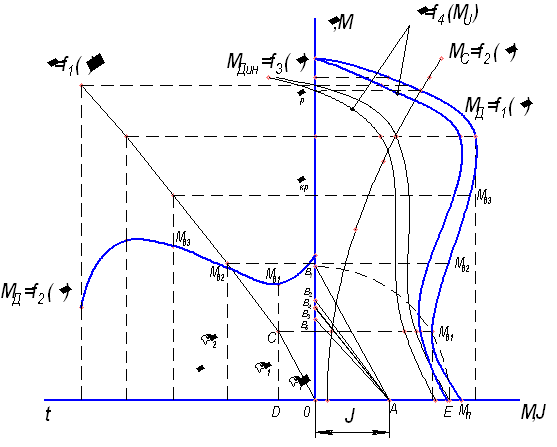
строятся механическая характеристика рабочей машины Определение времени разгона привода Графическое решение уравнения движения электропривода Если невозможно аналитически решить уравнение движения электропривода
то его решают методом пропорций или
методом конечных приращений. Сущность этого метода заключается в замене
бесконечно малых приращений скорости
где Расчет продолжительности пуска и торможения электропривода заключается в следующем: Выбираются масштабы момента
электропривод двигатель пуск торможение
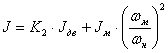
Рис. 2.1. Графическое решение уравнения движения электропривода Рассчитывается приведенный момент инерции системы «электродвигатель - рабочая машина» относительно вала электродвигателя
где Используя построенные механические
характеристики электродвигателя
График динамического момента
разбивается на ряд участков по оси Полученные на отдельных участках
значения динамических моментов откладываются вверх по оси Графоаналитическое решение уравнения движения электропривода Используя построенные механические
характеристики электродвигателя, рабочей машины и динамического (избыточного)
момента, можно без построения функции Продолжительность разгона электропривода на каждом интервале частот вращения рассчитывают по выражению
Полная продолжительность пуска равна
сумме частичных продолжительностей
где Проверка по допустимому времени
разгона заключается в сравнении последнего с расчетным Допустимое время разгона находится в пределах 10-13 секунд. Расчет потерь энергии при пуске и торможении Потери энергии при пуске асинхронного электродвигателя определяются электрическими потерями энергии в его обмотках, которые прямо пропорциональны квадрату силы тока. Потери энергии при пуске асинхронного
электродвигателя с нагрузкой
где Потери энергии
При торможении противовключением системы без нагрузки потери энергии (Дж) в асинхронном электродвигателе составят
Проверка устойчивой работы электропривода Вращающий момент асинхронного электродвигателя для любой фиксированной скорости вращения пропорционален квадрату приложенного напряжения, поэтому для всех скоростей вращения справедливо соотношение
где
Для оценки возможности запуска
электродвигателя с нагрузкой в случае снижения напряжения на Это позволит сделать заключение: -электродвигатель не запустится; -электродвигатель запустится; -затяжной пуск электродвигателя; -электродвигатель «застрянет» и не развернется до частоты вращения, соответствующей рабочей зоне его механической характеристики. Двигатель запустится но будет работать с перегрузкой. Снижение пускового тока путем введения дополнительного сопротивления в обмотку статора Аналитический метод Сопротивление короткого замыкания электродвигателя при прямом пуске
Активное сопротивление статора при коротком замыкании
Индуктивное сопротивление статора при коротком замыкания
Степень уменьшения пускового тока
Добавочное активное сопротивление
Добавочное индуктивное сопротивление
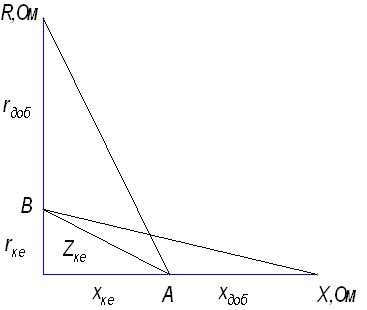
Графический метод По величинам
на линии
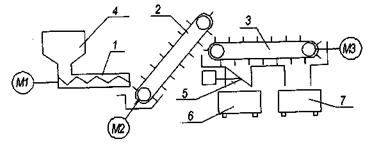
Рис. 2.2 Определение добавочных сопротивлений цепи статора графическим методом Задание № 3. Вариант 6 Линия загрузки кормов в кормораздатчик При наличии корма в бункере 4 (рис. 3.1) и расположении кормораздатчиков 6 и 7 под окнами загрузки оператор может дать команду на включение линии загрузки кормов. Выполнение команды осуществляется в следующем порядке. Открывается заслонка 5, включаются скребковые транспортеры 2 и 3, а также шнек извлекатель 1. После загрузки кормораздатчика 6 закрывается заслонка 5 и корм поступает в кормораздатчик 7, и после его загрузки линия загрузки корма отключается. Мощности электродвигателей
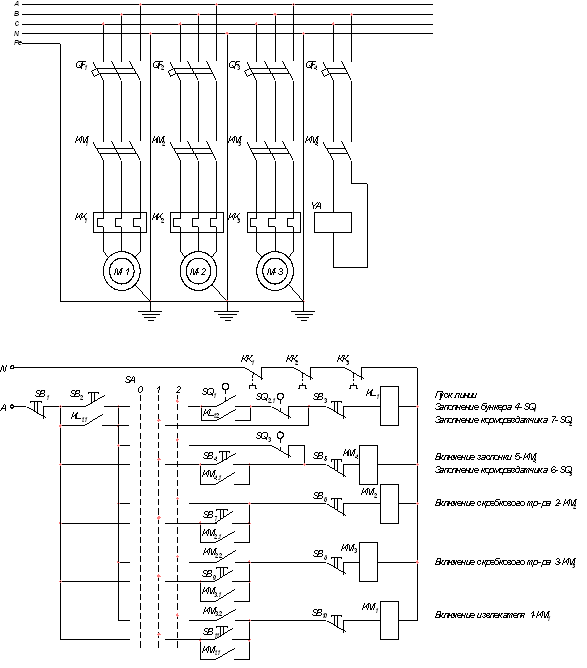
Рис. 3.1 Линия загрузки кормов в кормораздатчик Описание работы схемы Ставим переключатель SA в положение 2 автоматический режим, если SQ1 (следит за уровнем бункера) через SQ2 (заполнение кормораздатчика 7) замкнут бункер полный включается KL1 и шунтирует питание, получает питание КМ4 (заслонка) через SQ3 (заполнение кормораздатчика 6), одновременно получает питание KM2 (скребковый транспортер 2), замыкая свой контакт KM2.2 включая КМ3 (скребковый транспортер 3) в свою очередь замыкая свой контакт KM3.2 включает КМ1 (извлекатель 1) После того как заполнился кормораздатчик 6 размыкает контакт SQ3 заслонка выкрывается, и корм поступает в кормораздатчик 7, после заполнения кормораздатчика 6 размыкает свой контакт SQ2 и вся линя отключается. Если переключить SA в положение 1 ручной режим питание подается на кнопки управления схемы.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 (2.1)
(2.1) (2.8)
(2.8)
 (2.11)
(2.11)
 (2.12)
(2.12) (2.20)
(2.20)
 (2.21)
(2.21)
Страницы: 1, 2
Приглашения
09.12.2013 - 16.12.2013
Международный конкурс хореографического искусства в рамках Международного фестиваля искусств «РОЖДЕСТВЕНСКАЯ АНДОРРА»
09.12.2013 - 16.12.2013
Международный конкурс хорового искусства в АНДОРРЕ «РОЖДЕСТВЕНСКАЯ АНДОРРА»

