 |
|
МЕНЮФестивали и конкурсы Семинары Издания О МОДНТ Приглашения Поздравляем НАУЧНЫЕ РАБОТЫ |
Реферат: АНАЛИЗ СФЕРИЧЕСКОГО ПЬЕЗОКЕРАМИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯРеферат: АНАЛИЗ СФЕРИЧЕСКОГО ПЬЕЗОКЕРАМИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯСАНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙМОРСКОЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ФАКУЛЬТЕТ МОРСКОГО ПРИБОРОСТРОЕНИЯ КАФЕДРА ФИЗИКИ КУРСОВАЯ РАБОТА АНАЛИЗ СФЕРИЧЕСКОГОПЬЕЗОКЕРАМИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ
ВЫПОЛНИЛ: СТУДЕНТ ГРУППЫ 34РК1СУХАРЕВ Р.М. ПРОВЕРИЛ: ПУГАЧЕВ С.И. САНКТ-ПЕТЕРБУРГОСЕННИЙ СЕМЕСТР 1999г. СОДЕРЖАНИЕ
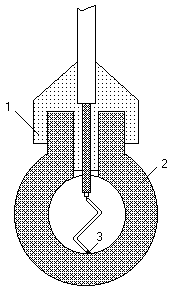
1. КРАТКИЕ СВЕДЕНИЯ ИЗ ТЕОРИИПьезокерамический сферический преобразователь (Рис.1) представляет собой оболочку 2 (однородную или склеенную из двух полусфер), поляризованную по толщине, с электродами на внутренней и внешней поверхностях. Вывод от внутреннего электрода 3 проходит через отверстие и сальник 1, вклеенный в оболочке.
Рис. 1Уравнение движения и эквивалентные параметры.
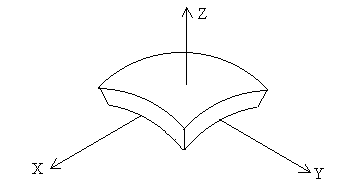
В качестве примера рассмотрим радиальные колебания ненагруженной тонкой однородной оболочки со средним радиусом а, поляризованный по толщине d, вызываемые действием симметричного возбуждения (механического или электрического). Рис. 2Направление его поляризации совпадает с осью z; оси x и y расположены в касательной плоскости (Рис.2). Вследствие эквипотенциальных сферических поверхностей E1=E2=0; D1=D2=0. Из-за отсутствия нагрузки упругие напряжения T3 равны нулю, а в силу механической однородности равны нулю и все сдвиговые напряжения. В силу симметрии следует равенство напряжений T1=T2=Tc, радиальных смещений x1=x2xС и значения модуля гибкости, равное SC=0,5(S11+S12). Заменив поверхность элемента квадратом (ввиду его малости) со стороной l, запишем относительное изменение площади квадрата при деформации его сторон на Dl: Очевидно,
относительной деформации площади поверхности сферы соответствует радиальная
деформация
Аналогия для индукции:
Исходя из условий постоянства T и E, запишем уравнение пьезоэффекта:
Решая задачу о колебаниях пьезокерамической тонкой сферической оболочки получим уравнения движения сферического элемента
где
представляет собой собственную частоту ненагруженной сферы. Проводимость равна
где энергетический коэффициент связи сферы определяется формулой
Из (4) находим частоты резонанса и антирезонанса:
Выражение (4) приведем к виду:
Отсюда эквивалентные механические и приведенные к электрической схеме параметры, коэффициент электромеханической трансформации и электрическая емкость сферической оболочки равны:
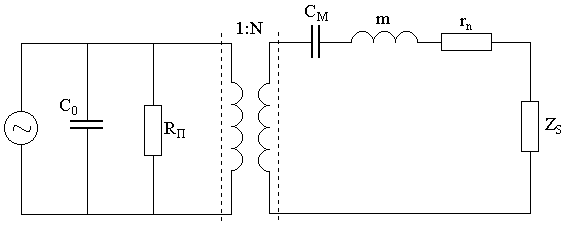
Электромеханическая схема нагруженной сферы. Учесть нагрузку преобразователя можно
включением сопротивления излучения Приведем формулу чувствительности сферического приемника:
где Колебания реальной оболочки не будут пульсирующими из-за наличия отверстия в оболочке (для вывода проводника и технологической обработки) и неоднородности материала и толщины, не будут так же выполняться и сформулированные граничные условия. 2. ИСХОДНЫЕ ДАННЫЕ
ВАРИАНТ С-41
a=0,01 м – радиус сферы
a=0,94 b=0,25 hАМ=0,7 – КПД акустомеханический e0=8,85×10-12 (rc)В=1,545×106 3. ОПРЕДЕЛЕНИЕ ЭЛЕМЕНТОВ ЭКВИВАЛЕНТНОЙ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СХЕМЫ, ВКЛЮЧАЯ N, Ms, Rs, Rпэ, Rмп
Электромеханическая схема цилиндрического излучателя: Рис. 3 коэффициент электромеханической трансформации:
N=-2,105 присоединенная масса излучателя:
MS=4,851×10-5 кг сопротивление излучения:
RS=2,31×103 активное сопротивление (сопротивление электрических потерь):
RПЭ=1,439×103 Ом
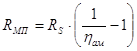
СS=4,222×10-9 Ф сопротивление механических потерь:
RМП=989,907 4. НАХОЖДЕНИЕ КОНЕЧНЫХ ФОРМУЛ ДЛЯ КЭМС И КЭМСД И РАСЧЕТ ИХ ЗНАЧЕНИЙ
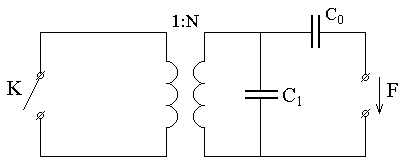
Представим эквивалентную схему емкостного ЭАП для низких частот: Рис. 4статическая податливость ЭАП:
электрическая емкость свободного преобразователя:
CT=4,635×10-9 Ф
КЭМС=0,089 ; КЭМСД=0,08 5. ОПРЕДЕЛЕНИЕ ЧАСТОТЫ РЕЗОНАНСА И АНТИРЕЗОНАНСА:
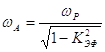
wр=1,265×107
wА=1,318×107 6. ВЫЧИСЛЕНИЕ ДОБРОТНОСТИ ЭЛЕКТРОАКУСТИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ В РЕЖИМЕ ИЗЛУЧЕНИЯ
Qm=65,201 эквивалентная
масса:
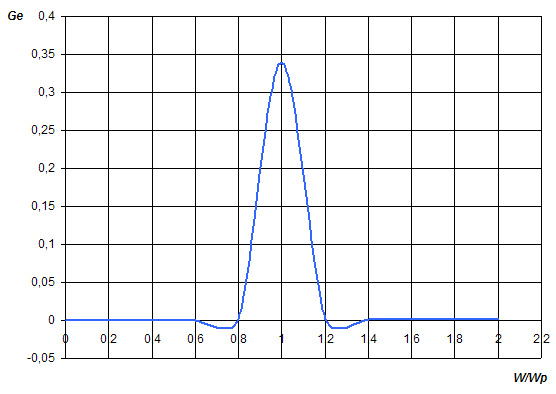
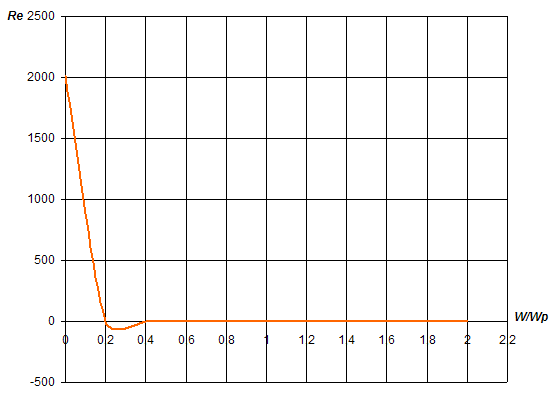
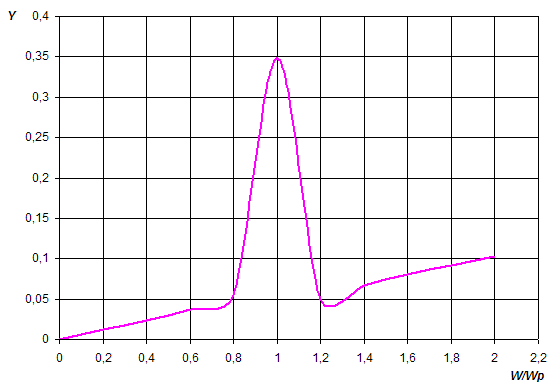
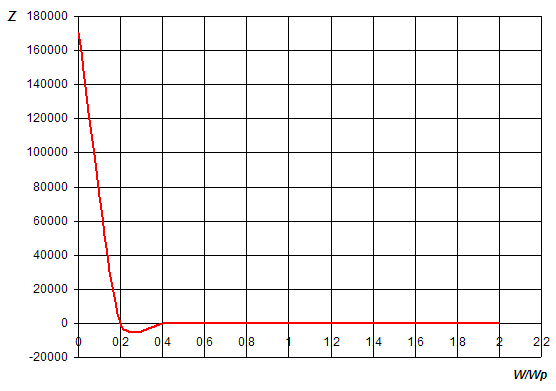
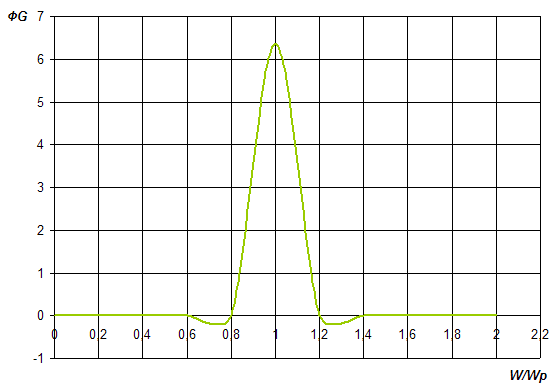
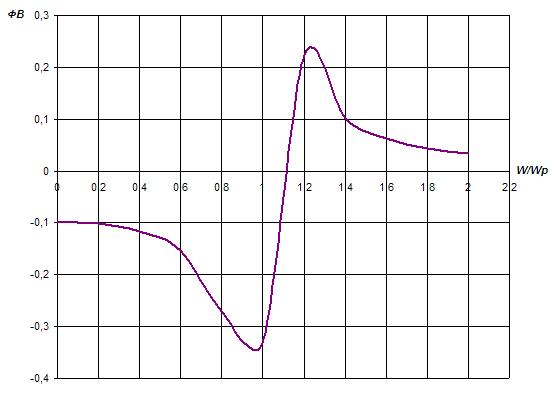
MЭ=0,017 кг 7. РАСЧЕТ И ПОСТРОЕНИЕ ЧАСТОТНЫХ ХАРАКТЕРИСТИК ВХОДНОЙ ПРОВОДИМОСТИ И ВХОДНОГО СОПРОТИВЛЕНИЯ
активная проводимость:
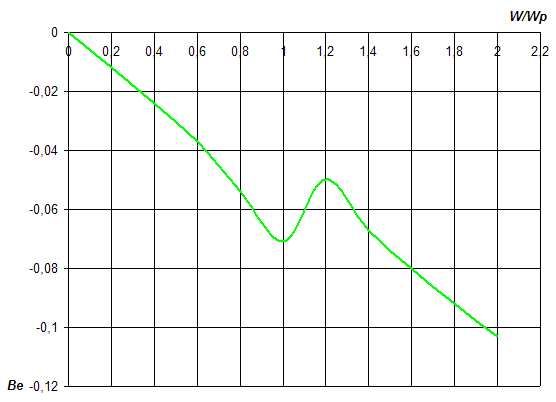
реактивная проводимость:
активное сопротивление:
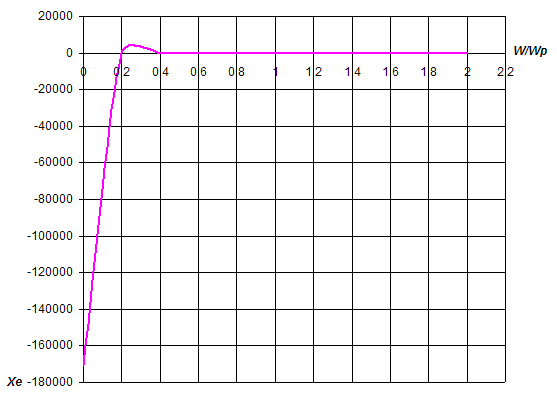
реактивное сопротивление:
входная проводимость:
входное сопротивление:
8. СПИСОК ЛИТЕРАТУРЫ1. Пугачев С.И. Конспект лекций по технической гидроакустике. 2. Резниченко А.И. Подводные электроакустические преобразователи. Л.: ЛКИ, 1990. 3. Свердлин Г.М. Гидроакустические преобразователи и антенны. Л.: Судостроение, 1988. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 , (4)
, (4) ;
;  .
(6)
.
(6) .
. ;
;  ;
; 

 ,
, ;
;

Приглашения
09.12.2013 - 16.12.2013
Международный конкурс хореографического искусства в рамках Международного фестиваля искусств «РОЖДЕСТВЕНСКАЯ АНДОРРА»
09.12.2013 - 16.12.2013
Международный конкурс хорового искусства в АНДОРРЕ «РОЖДЕСТВЕНСКАЯ АНДОРРА»

