 |
|
МЕНЮФестивали и конкурсы Семинары Издания О МОДНТ Приглашения Поздравляем НАУЧНЫЕ РАБОТЫ |
Реферат: Автоматические устройства2. Составление уравнений движения. Уравнения движения детали К имеют вид: Xk=Xk(0)+Vkx´t; Vkx=Vkcosa= - 0,108м/c; (32) Yk=Yk(0)+Vky´t; Vky=Vksina= - 0,284м/c. Предполагая,что координаты захвата М известны в процессе движения,можно вычислить рассогласования координат точек К и М. DX=Xk - XM; DY=Yk - YM (33) Учитывая,что управление манипулятором осуществляется по линейной комбинации рассогласовании и их производных ux=DX + T* При управлении с большими коэффициентами усиления k с погрешностью порядка 1/k выполняются соотношения: ux=0, uy=0. (35) Подставляя (35) в выражения (32), (33), (34) и приводя полученные уравнения к форме Коши получаем: Угловое движение звеньев манипулятора и скорость точки С однозначно определяется движением точки М и внешними связями, налагаемыми в точках D и С. Составляются выражения для проекций скоростей точек С и М. В соответствии с
графом С VMx=Vcx
- w3z´r3´sin(j3 - Vmy=w3z´r3´cos(j3
- В соответствии с графом D Vcx= - w1z´r1´sinj1
- w2z´r2´sinj2 - w3z´r3´sin(j3
+ Vcy= w1z´r1´cosj1
+ w2z´r2´cosj2 - w3z´r3´cos(j3
+ Из уравнений (37) , (38) получают: w3z=VMy/[r3(2cosj3+sinj3)]; Vcx=VMx+w3z´r3(2sinj3 - cosj3); (39) w1z= w2z= Уравнения (39) дополним дифференциальными соотношениями 3. Определение параметра управления. Из (34) и (35) получим уравнение в рассогласованиях: T* Решение этих уравнений имеет вид: Dx=Dx(0)
e- По условию, при t=t2 должно выполняться соотношение d = Т*
= 4. Решение задачи и обработка результатов. Система уравнений (36), (39), (40) интегрируется с помощью ЭВМ на интервале [0; 1,37] с использованием конечноразностной схемы Эйлера. Шаг интегрирования Dt=0,057c. Начальные условия по переменным j1, j2, j3 (рис.4) приведены в исходных данных, а по переменным XM, YM вычисляются по формулам : XM=r1 ´cosj1+r2 ´cosj2+2r3 ´cosj3 (41) YM=r1 ´sinj1+r2 ´sinj2+2r3 ´sinj3 Подставив в (41) числовые значения ri, ji(0), получают XM(0), YM(0). Последующие шаги интегрирования осуществляются с использованием зависимостей (22), с учетом, что с использованием зависимостей (41) Результаты счета по двум вариантам сравниваются. Программа счета составляется на любом языке программирования,результаты оформляются в виде таблицы. По результатам решения строятся графики j1(t), w1z(t), Vcx(t) и траектории сближения точек М и К, которые не должны иметь разрывов,а координаты точек М и К в момент времени t должны быть достаточно близки. Графоаналитическая проверка результатов счета производится аналогично проверке в первой задаче. III. Динамика механизма с двумя степенями свободы. Описание задания. Манипулятор с двумя степенями свободы (рис.1) переносит точечный груз М массой m за время t3 под действием двигателей управления, расположенных в шарнирах B и D из точки d в точку е с заданной скоростью VMx=0, VMy=V3 sinkt (43) Элементы конструкции считаются абсолютно жесткими и безинерционными. Силы трения в шарнирах и ползунах отсутствуют. Катки относительно опорных поверхностей не проскальзывают. Исходные данные определяются формулами (43), (44) и табл.1 r1=r1T+0,01n; ri=riT+0,01N(i=2,3,4); V3= ji(0)=jiT+0,01N , (i=1,2,3) m=10+N Требуется исследовать с помощью ЭВМ движения манипулятора. Перечень пунктов исследования приведен в примере. Указания к составлению уравнений кинетостатики для моментов и сил управления. Система освобождается
от связей и разделяется на отдельные звенья или группы звеньев. Вводятся
реакции связей. Прикладываются активные силы: внешняя сила - вес точки М - и
внутренние моменты управления MBz, MDz или сила управления
Fcx, Fcy в вариантах 2, 3, 7, 9, 10, 12, 14, 17, 18, 20,
21, 23, 24, 26, 27, 28. При освобождении связей в точках В и D к смежным
звеньям прикладываются моменты противоположных знаков. Для определенности
положительный момент прилагается со стороны звена с большим индексом к звену c
меньшим индексом. По принципу Даламбера к точке М условно прикладывается сила
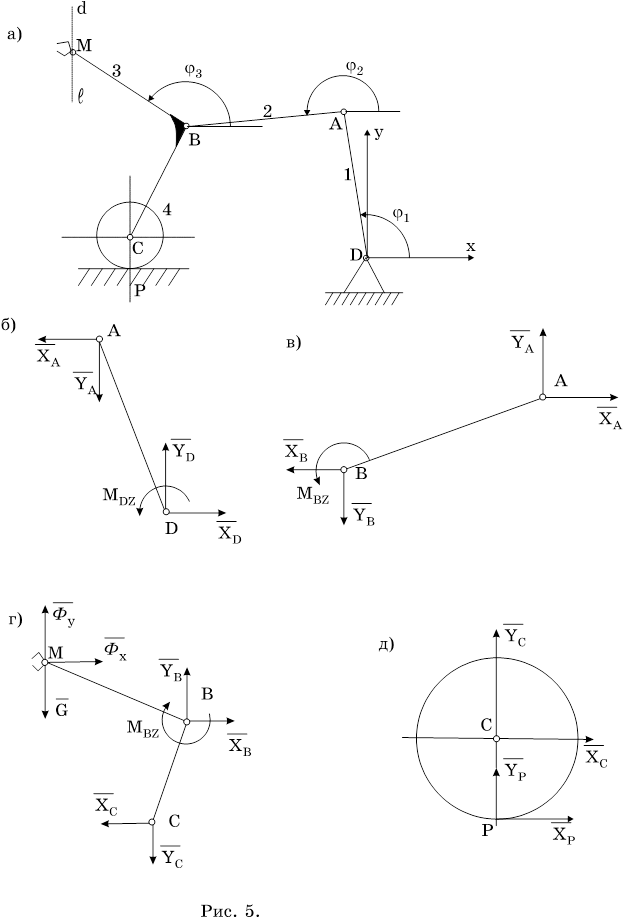
инерции Уравнения МBz, MDz или Fcx, Fcy получаются из уравнений кинетостатики для механической системы, включающей точку М и уравнений статики для механических систем, образованных из безинерционных звеньев. Из этих уравнений определяются MBz=MBz(j1, j2, j3, t); MDz=MDz(j1, j2, j3, t); (45) Fcx=Fcx(j1, j2, j3, t); Fcy=Fcy(j1, j2, j3, t). В общем случае определяются моменты управления МBz и МDz, силы управления Fcz и Fcy определяются по указанию преподавателя при уточнении задания. Указания к составлению кинематических уравнений движения. Выражения для определения неизвестных угловых скоростей w1z, w2z, w3z, w4z и проекции скорости точки С Vcz или Vcy по известной скорости точки М получаются по аналогии с предыдущими заданиями или заимствованы полностью из этих заданий. Из этих уравнений: w1z=w1z(j1, j2, j3, t); w2z=w2z(j1, j2, j3, t); w3z=w3z(j1, j2, j3, t); w4z=w4z(j1, j2, j3, t); (46) Vcx=Vcx(j1, j2, j3, t); Vcy=Vcy(j1, j2, j3, t). Уравнения (46) позволяют определить угловые скорости звеньев и проекции скорости точки С для фиксированного момента времени при заданных в этот момент значениях j1, j2, j3. Изменение j1, j2, j3,а следовательно, и w1z, w2z, w3z, w4z, Vcx, Vcy во времени определяется,если дополнить систему (46) уравнениями: Уравнения (46), (47) образуют систему дифференциальных уравнений, интегрированием которой при заданных начальных значениях j1(0), j2(0), j3(0) решается кинематическая задача о движении плоского механизма. Эти уравнения манипулятора, являющегося системой с двумя спепенями свободы записаны в избыточном наборе трех переменных j1, j2, j3. Поэтому начальные значения углов нельзя задавать произвольно. Они вычисляются предварительно для заданного начального положения точки М и приводятся в табл.1. Указания к решению задачи. Нелинейная система дифференциальных уравнений (46), (47) с заданными начальными условиями интегрируется на интервале времени [0,t] . Одновременно с вычислением ji по формулам (45) определяются МBz, MDz или Fcx, Fcy (по указанию преподавателя). На печать с шагом Dt= Решение задачи может производиться путем интегрирования с использованием конечноразностной схемы Эйлера или методом Рунге - Кутта. Указания к вычислению мощности управляющих приводов. Мощность, развиваемая приводами, вычисляется по формулам вида: NB=MBzwiz + (- MBz) wjz, (48) где i, j =i+1 - номер звеньев, соединяемых шарниром В. Если шарнир прикреплен к неподвижному основанию, формула (48) преобразуется в NB=MBzwiz , ND=MDzwiz (49) При движении ползуна в точке С в горизонтальном или вертикальном направлении мощность вычисляется соответственно по формулам вида: Nc=Fcx´Vcx, Nc=Fcy´Vcy (50) Контроль решения. Построенные по результатам счета графики МBz (t), MDz (t) или Nc, j1(t), w1z(t), w2z(t), w3z(t),VM(t), Vcx(t), Vcy(t) не должны иметь разрывов. При t = 0 и t = t скорость груза М равна нулю, поэтому в правильно решенной задаче угловые скорости звеньев в начальный момент должны быть равны нулю, а при t = t отличие за счет погрешностей счета от нуля должно быть малым. Результаты вычисления на ЭВМ угловых скоростей звеньев должны близко совпадать с результатами графоаналитического решения для момента времени t=(N+1)Dt. Пример выполнения задания. (вариант 31, n=1, N=2) 1. Постановка задачи. Манипулятор (рис.5) перемещает точечный груз массы m за время t3 из точки d в точку е с заданной скоростью Vмс=0, Vмy=Vsin kt. Управляющие двигатели расположены в шарнирах B и D. Дано: DA=r1=0,953м; BC=r3=0,457м; BM=2r3; AB=r2=0,847м; j1(0)=1,63рад; j2(0)=3,37рад; j3(0)=2,87рад; t3=1,68c; V=0,45м/c; k=1,87рад/c; m=17кг. Массой элементов конструкции и приводов можно пренебречь. Требуется: 1. Составить уравнения кинетостатики для определения управляющих моментов, реализующих заданное программное движение груза. 2. Составить кинематические уравнения, определяющие изменение во времени угловых скоростей, углов поворота звеньев и скорости точки С. 3. Решить полученные уравнения на ЭВМ на интервале времени [0,t3]. 4. Построить графики МBz, MDz, j1(t), w1z(t), w3z(t). 5. Для момента времени t=(N+1)Dt=0,56c определить с помощью графоаналитического метода угловые скорости звеньев, скорость точки С и сравнить с результатами счета на ЭВМ. 6. По данным счета найти мощность каждого двигателя при t=0,56c. 2. Составление уравнений кинетостатики для управляющих моментов.
Для составления
уравнений кинетостатики система освобождается от связей. На рисунке
изображаются реакции связей, активные силы: сила Фx=0 Фy=m´aмy=m Составляются уравнения равновесия систем сил, указанных на рис. 4б, б, в, г, д. Для звена 1 (рис 5б): SXi=XD - XA=0 SYi=YD - YA=0 (52) SMD=MD2+YA´r1´sin(j1
- Для звена 2 (рис.5в): SXi=XA - XB=0 SYi=YA - YB=0 (53) SMB=MBz+XA´r2´sin(j2 -p)+YA´r2´cos(j2 -p)=0 Для звена 3 (рис.5г): SXi=ФX + XB - XC=0 SYi=ФY - G+YB - YC=0 (54) SMB= - MBz+(G - ФY)´2r3´sin(j3 -
- Xc ´r3´sin(j3
- Для звена 4 (рис.5д): SXi=XP + XC=0 SYi=YP + YC=0 (55) Так как XP=0, то из (55) XC=0 Так как ФX=0 и XC=0, то из (54) XB=0, а из (53) и (52) XA=0 и XD=0. То есть ФX=XP=Xc=XP=XD=XA=0 (56) Из (52), (53) YA=YB=YD Из (54) YB - YC=G - ФY (57) Из уравнений (52), (53), (54) MDz=YA´r1´cosj1 MBz=YA´r2´cosj2 (58) MBz=(ФY - G)´2r3´cosj3+YC´r3´sinj3 Из уравнений (57), (58) YC=YA - G+ФY YA´r2´cosj2=(ФY- G)´2r3´cosj3+YA´r3´sinj + (ФY - G)´r3´sinj3 YA(r2 cosj2 - r3sinj3)=(ФY - G)(2r3 cosj3+r3sinj3) MBz= MDz= или из уравнений (58) MDz=MBz 3. Составление кинематических уравнений. Кинематические уравнения (39) заимствуются из ранее решенных задач и с учетом того,что VMx=0; VMy=V sin kt, запишутся: w3z= Vcx=w3z´r3(2sinj3 - cosj3), (61) w1z= w2z= Дополним (61) уравнениями: 4. Вычисление мощности двигателей управления. NB=MBz(w2z - w3z) (63) ND=MDz´w1z, (64) 5. Решение задачи и обработка результатов. Вычисления в силу уравнений (59), (60), (61), (62) проводятся на ЭВМ. Для интегрирования уравнений (61), (62) используется конечноразностная схема Эйлера с шагом интегрирования, равным шагу печати Dt=0,07c. По результатам решения задачи строятся графики j1(t), w1z(t), w2z(t), w3z(t), MBz(t), MDz(t). Для вычисления мощности двигателей из таблицы счета выбираются значения угловых скоростей и моментов упрвления для t=0,56c. Эти значения подставляются в (63), (64). 6. Контроль решения. Графики не должны иметь разрывов. При t=0 и t=t3 угловые скорости близки к нулю. Результаты графоаналитической проверки для момента времени t=0,56c близки результатам счета на ЭВМ. Литература. 1. Красковский Е.Я., Дружинин Ю.А., Филатов Е.М., Расчет и конструирование механизмов приборов и вычислительных систем. Учебное пособие для приборостроительных специальностей вузов. -M; Высш.шк., 1991-480с. 2. Механика промышленных роботов; Учебное пособие для вузов: в 3 кн./Под ред. К. В. Фролова, Е. И. Воробьева, М. Высш.шк., 1988. 3. Бурдаков С.Ф. Проектирование манипуляторов промышленных роботов и роботизированных комплексов. Учебное пособие для студентов вузов, обучающихся по специальности: ” Робототехнические системы и комплексы ”/С. Ф. Бурдаков, В. А. Дьяченко, А. Н. Тимофеев М.: Высш.шк., 1988. 4. Камышный Н. М., Автоматизация загрузки станков - М.; Машиностроение, 1977.- 287c. 5. Красников В. Д., Промышленные роботы и манипуляторы: Учебное пособие Ростов-на-Дону: Институт с/x машиностроения, 1981 - 148c. 6. Новожилов И. В., Зацепин М. Ф. Типовые расчеты по теоретической механике на базе ЭВМ. Учебное пособие для вузов. - М.: Высш.шк., 1986 - 264 с. |
 ;
;
 ,
,
 ,
,Приглашения
09.12.2013 - 16.12.2013
Международный конкурс хореографического искусства в рамках Международного фестиваля искусств «РОЖДЕСТВЕНСКАЯ АНДОРРА»
09.12.2013 - 16.12.2013
Международный конкурс хорового искусства в АНДОРРЕ «РОЖДЕСТВЕНСКАЯ АНДОРРА»

