 |
|
МЕНЮФестивали и конкурсы Семинары Издания О МОДНТ Приглашения Поздравляем НАУЧНЫЕ РАБОТЫ |
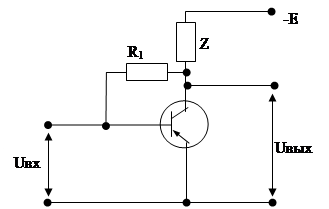
Дипломная работа: Устройство измерения отношения двух напряженийВеличины dС и dUвых имеют следующий физический смысл. В любой делительной схеме в результате климатических воздействий, изменений напряжения питания в некоторых пределах изменяется выходная величина, что соответствует изменению постоянной деления C и вносит погрешность, обозначенную как dC. Погрешность измерения выходной величины напряжения обозначена dUвых. Из выражения (1.10) следует, что для dС=2% и dUвых=1% измерения отношения r=0.99 будут обеспечиваться с предельной погрешностью dr=0.003% [1]. 1.2.5 Цифровой метод измерения отношения При вычислении отношения при помощи микропроцессора, напряжения, отношения которых необходимо найти преобразуются в цифровой код, а затем осуществляется операция деления одного числа на другое. Известно, что представление числовой информации в вычислительной машине ограничено разрядностью [3]. И если результат выполнения арифметического действия по количеству разрядов превышает разрядную сетку устройства, то часть разрядов теряется В настоящее время существует множество алгоритмов выполнения деления одного числа, представленного в двоичном коде на другое. Причем выполнения операции деления зависит от вида формата в котором представлено число. Операции над числами с фиксированной точкой наиболее часты в практике программирования. Это объясняется тем, что большинство прикладных задач не требует такой точности, какую может дать плавающая точка, а скорость обработки, особенно в регистровых командах, значительно выше. Для представления чисел с фиксированной точкой используется двоичная система счисления. Числа размещаются в формате полуслова (16 бит), слова (32бита) и двойного слова (64 бита). Размером этих полей фиксированной длины определяется диапазон представления чисел, а при фиксированном диапазоне – точность представления числа. Для представления чисел с плавающей точкой используется полулогарифмическая форма, которая имеет вид где М – мантисса числа А, r – порядок числа. Положение запятой определяется значением порядка r. С изменением порядка в ту или другую сторону точка перемещается (плавает) в лево или право. Под мантиссу и порядок в машине отводится определенное число разрядов. Например, при представлении в формате слова - 24. Диапазон представления десятичных чисел, взятых по абсолютному значению, определяются неравенством [3]: 10-77≤│A(10)│≤1076. Преобразование числовой информации в формат с плавающей точкой осуществляется программным путем. 1.3 Методы построения усилителей постоянного тока 1.3.1 Дрейф нуля в усилителях постоянного тока Дрейфом начального уровня или дрейфом нуля называется самопроизвольное изменение выходного напряжения при неизменном или равном нулю входном напряжении. Дрейф нуля является основным источником погрешностей в измерительных приборах, в которых необходимо усиливать сигналы постоянного напряжения [4,5,6]. Причины возникновения дрейфа начального уровня напряжения или тока в УПТ различные. Во-первых, колебания температуры окружающей среды вызывают изменения токов коллекторного и эмиттерного р-п переходов, напряжения база - эмиттер и коэффициента усиления тока биполярных транзисторов. У полевых транзисторов с изменением температуры также изменяются соответствующие параметры. Во-вторых, при изменении напряжений источников питания усилительных каскадов изменяется напряжение на выходе усилителя, даже если его входное напряжение оставалось неизменным. В-третьих, происходит старение параметров транзисторов, т. е. их изменение во времени. В-четвертых, в соединениях, выполненных с помощью паек, а также в других соединениях элементов или микросхем, которые являются неоднородными, могут возникать термоЭДС. Последние усиливаются в каскадах, и на выходе усилителя возникает изменение напряжения. Перечисленные дестабилизирующие факторы протекают медленно во времени и усиливаются наравне с входным медленно изменяющимся сигналом, вызывая определенную погрешность выходного напряжения. Для уменьшения дрейфа начального напряжения в УПТ прямого усиления применяют специальные балансные или разностные схемы каскадов, а иногда электрическую изоляцию каскадов друг от друга с помощью оптопар, которая позволяет получить изолирующие каскады. В УПТ с преобразованием (модуляцией) усиливаемого сигнала уменьшение дрейфа нуля достигается другим способом, однако и здесь возникают трудности, которые преодолеть непросто. 1.3.2 Стабилизация точки покоя в транзисторных каскадахТок покоя выходной цепи усилительного каскада в рабочих условиях не должен сильно отклоняться от величины, обеспечивающей нормальную работу, так как иначе свойства каскада ухудшатся и он даже может стать неработоспособным. При питании от одного источника достаточную стабильность тока покоя выходной цепи (или, что то же самое, достаточную стабильность положения точки покоя на семействе статических выходных характеристик транзистора), обеспечивающую работоспособность транзисторных каскадов при изменении температуры и замене транзисторов, можно получить при использовании схем стабилизации тока покоя выходной цепи (схем стабилизации точки покоя)[4,5]. Простейшей и наиболее экономичной из таких схем является коллекторная стабилизация (рис.1.5), в которой стабилизация положения точки покоя осуществляется параллельной отрицательной обратной связью по напряжению, снимаемой с коллектора транзистора.
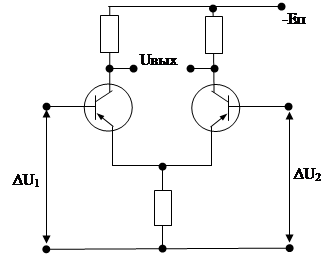
Рисунок 1.5 - Коллекторная стабилизация точки покоя при включении транзистора с общим эмиттером Здесь к резистору R1 приложена разность напряжения источника питания Е и падения питающего напряжения на сопротивлении коллекторной нагрузки Z. Если почему-либо ток покоя выходной цепи стремится возрасти, падение напряжения на Z увеличивается, приложенное к R1 напряжение уменьшается и ток смещения базы падает, что не дает току покоя сильно увеличится; при стремлении тока покоя уменьшиться описанный процесс автоматического регулирования происходит обратным образом. 1.3.3 Дифференциальные каскады Эффективным схемным решением, резко уменьшающим дрейф нуля, вызванный как температурной нестабильностью транзисторов, так и изменением питающих напряжений, является использование в усилителе так называемых дифференциальных каскадов[4,5,6]. Простейшая схема дифференциального каскада на биполярных транзисторах изображена на рис. 1.6. Если транзисторы одинаковы, то при любом большом значении их дрейфа потенциалы на коллекторах изменятся на одинаковую величину, а напряжение Uвых между ними останется неизменным. Таким образом, в этой схеме напряжение Uвых оказывается нечувствительным к синфазным сигналам, т. е. к дрейфу нуля. Для создания между коллекторами транзисторов полезного усиливаемого сигнала необходимо подавать его на базы транзисторов в противоположных фазах. Для создания между коллекторами транзисторов полезного усиливаемого сигнала необходимо подавать его на базы транзисторов в противоположных фазах. В этом случае напряжение Uвых определяется только входным (дифференциальным) сигналом и совершенно не зависит от дрейфа нуля (синфазный сигнал). В реальных условиях полной идентичности транзисторов добиться нельзя и синфазные сигналы будут проникать на выход устройства, создавая выходное напряжение ошибки (дрейфа). Однако его величина в таком дифференциальном каскаде оказывается очень малой.
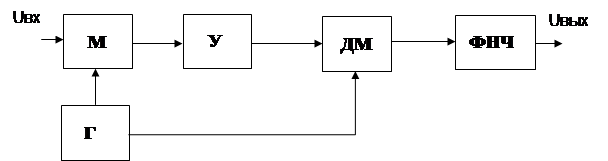
Рисунок 1.6 -Дифференциальный каскада на биполярных транзисторах 1.3.4 Усилители постоянного тока с преобразованием частоты усиливаемых сигналов Для усиления сигналов с напряжением ниже сотен микровольт усилители постоянного тока прямого усиления непригодны, и для этой цели приходится использовать усилители постоянного тока с преобразованием частоты усиливаемых сигналов. В таких усилителях напряжение усиливаемых сигналов, имеющих спектр частот от 0 до W при помощи балансного модулятора модулирует по амплитуде напряжение генератора несущей частоты w, в результате чего на выходе модулятора получают модулированные колебания несущей частоты со спектром боковых, частот w±W Эти колебания подают на вход усилителя переменного тока рассчитанного на пропускание полосы частот w±W; усиленные модулированные колебания детектируются балансным демодулятором, выделяющим из этих колебаний усиленный сигнал первоначальной формы который после отфильтровывания остатка несущей частоты и ее гармоник поступает в нагрузку. Для неискаженного усиления несущая частота w должна по крайней мере в 5—10 раз превышать наивысшую частоту Wв усиливаемых сигналов. Дрейф усилителей постоянного тока с преобразованием в основном определяется дрейфом балансного модулятора. К достоинствам усилителей постоянного тока с преобразованием можно отнести малый уровень дрейфа, отсутствие необходимости стабилизации источников питания, простоту введения обратной связи и регулировки усиления; их недостатком является сложность устройства, включающего в себя, кроме усилителя (У), генератор несущей частоты (Г), балансные модулятор (М), демодулятор (ДМ) и фильтр(фнч). В УПТ с модуляцией сигнала удаётся получить дрейф начального уровня менее 2мкВ/°С [6]. Схема описываемого УПТ представлена на рисунке 1.7.
Рисунок 1.7 – Структурная схема усилителя постоянного тока с преобразованием частоты усиливаемых сигналов
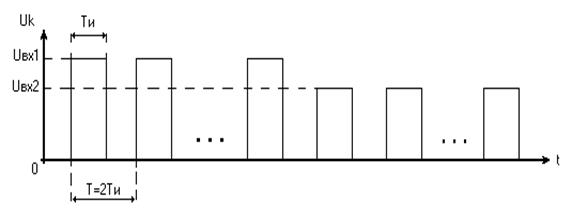
1.4 Выводы На основании анализа, проведенного в данном разделе обозначим основные принципы построения разрабатываемого устройства. Так для выполнения непосредственно операции деления в микропроцессоре необходимо воспользоваться алгоритмом деления, при котором числа представляются в формате с плавающей запятой. Это позволит обеспечить необходимую точность вычислений и избежать дополнительной погрешности при измерении отношения напряжений. Усиливать входные сигналы стоит при помощи усилителей постоянного тока, в которых постоянное напряжение преобразуется в переменное, а только затем усиливается. Однако необходимости преобразовывать переменное напряжение обратно в постоянное при решении нашей задачи нет. Поэтому при реализации разрабатываемого устройства целесообразно перейти от сигналов с постоянным напряжением к переменным, что можно осуществить при помощи обычного коммутатора. Таким образом, это решение существенно облегчит реализацию усилительного тракта прибора и решит проблему дрейфа нуля, не увеличив при этом погрешность измерений. Так как в соответствии с техническим заданием динамический диапазон входных напряжений достаточно большой (60 дБ ) то в тракте усиления необходимо использовать усилитель с переменным коэффициентом передачи, которые в настоящее время выпускаются промышленностью. Это обеспечит сжатие динамического диапазона сигнала, поступающего на вход аналого-цифрового преобразователя АЦП. Такое решение позволяет резко снизить относительную погрешность, возникающую из-за квантования преобразуемого сигнала. Процесс обратного расширения динамического диапазона будет осуществлять в процессоре. Для снижения погрешности, причиной которой являются шумы, необходимо применять малошумящие усилители. Кроме того необходимо будет реализовать цифровую фильтрацию, что обеспечит увеличение отношения сигнал – шум, а следовательно уменьшит погрешность измерения. 2 РАЗРАБОТКА ПРИНЦИПОВ ПОСТРОЕНИЯ ИЗМЕРИТЕЛЯ ОТНОШЕНИЙ. 2.1 Функциональная схема На основании выводов, сделанных в первом разделе проведем разработку функциональной схемы прибора. Эта схема приведена на рис.2.1. Так как разрабатываемое устройство должно измерять отношения весьма малых напряжений ( от 10 мкВ до 10мВ ) то совершенно очевидно, что данные напряжения необходимо усиливать. Причём целесообразно данные напряжения усиливать по одному тракту усиления. Данное техническое решение позволит исключить дополнительную погрешность связанную с нестабильностью параметров элементов схемы. Два тракта усиления собранные на одной элементной базе будут всегда иметь небольшое различие в коэффициентах передачи из за временной нестабильности, (воздействие на схему различных дестабилизирующих факторов) и старения. В свою очередь это небольшое отличие является причиной неточности при измерении той или иной величины, например, как в данной работе, при измерении отношения двух напряжений. Кроме того, использование одного тракта усиления позволит уменьшить стоимость разрабатываемого устройства за счёт сокращения используемых элементов, что также не маловажно при проектировании реального устройства. Для реализации выбранного технического решения входные сигналы будем подавать на единый тракт усиления последовательно, через коммутатор К, управляемый центральным процессором П1. Как было описано в первой главе данной работы, причиной большой погрешности в измерениях при усилении постоянных напряжений может являться дрейф нуля. Во избежание данного явления целесообразно перейти от постоянных напряжений к переменным. Этот переход можно осуществить при помощи коммутатора К, который последовательно будет подключать ко входу предварительного усилителя ПУ либо один из входных сигналов, либо общий провод, потенциал которого равен нулю. Таким образом, для осуществления схемы с одним трактом усиления и перехода от сигналов постоянного напряжения к сигналам с переменным напряжением используем трехканальный коммутатор, на один вход которого подается первый входной сигнал, на второй вход – второй входной сигнал. Третий вход коммутатора необходимо присоединить к общему проводу. Центральный процессор должен управлять коммутатором таким образом, чтобы на выходе коммутатора было сформировано две последовательности прямоугольных импульсов одинаковой частоты со скважностью равной двум. Причем амплитуды сформированных последовательностей будут равны величинам напряжений входных сигналов. (Рисунок 2.2)
Рисунок 2.2 – Сигнал, формируемый на выходе коммутатора Как уже было упомянуто выше, управляться четырехканальный коммутатор будет центральным микропроцессорным устройством. Причем частоту последовательностей прямоугольных импульсов выберем равной F=1 кГц. Частоту смены импульсных последовательностей следует выбрать исходя из расчётов времени, которое требуется на установление переходного процесса цифрового фильтра описанного далее, и времени, которое требуется процессору для выполнения заложенных в него алгоритмов обработки поступающей информации. Далее сформированные коммутатором импульсные последовательности усиливаются предварительным усилителем ПУ. Так как поступаемый на вход ПУ сигнал имеет малый уровень (в худшем случае 10 мкВ в соответствии с техническим заданием), то усилитель, дабы не вносить большую погрешность в измерение требуемой величены, должен иметь малый коэффициент шума. Основным требованием, которому должен соответствовать выбираемый усилитель является низкий коэффициент шума. Поэтому следует выбрать малошумящий операционный усилитель. Коэффициент передачи по напряжению предварительного усилителя выберем позже. Так как в соответствии с техническим заданием динамический диапазон входных напряжений достаточно большой (60 дБ ) то в тракте усиления необходимо использовать усилитель с переменным коэффициентом передачи. Это обеспечит сжатие динамического диапазона сигнала, поступающего на вход аналого-цифрового преобразователя АЦП. Такое решение позволяет резко снизить относительную погрешность, возникающую из-за квантования преобразуемого сигнала (абсолютное значение этой погрешности равно единице младшего разряда). Обратное расширение динамического диапазона будем осуществлять в центральном процессоре путем деления полученного кода на коэффициент усиления управляемого усилителя. Используем двуполярный двенадцатиразрядный АЦП с максимальной амплитудой сигналов подаваемых на АЦП равной Umax=2 В. В двенадцатиразрядном АЦП один разряд знаковый. Зная это можно найти число уровней квантования, которое равно N=211=2048. Тогда шаг квантования Относительную погрешность вносимую при оцифровке сигнала можно оценить как отношение шага квантования к входному сигналу. При максимальном значении амплитуды подаваемого на АЦП сигнала погрешность равна: δmin =(0,001/2)*100% =0,05%. Это будет минимальная погрешность вносимая АЦП. Подберём коэффициент передачи всего усилительного тракта таким образом, чтобы минимальная амплитуда сигнала подаваемого на вход АЦП была в два раза меньше максимального значения амплитуды, то есть 1 В. Погрешность при этом будет равна δmax=(0,001/1)*100% =0,1%. Это и будет максимальная погрешность АЦП. Для того чтобы погрешность не превышала данное значение, необходимо чтобы при любом значении входного сигнала, на АЦП поступала импульсная последовательность, амплитуда которой попадала бы в диапазон от 1 В до 2 В. Это можно реализовать при помощи управляемых усилителей УУ1-УУ3 коэффициенты передачи которых устанавливаются цифровым кодом с процессора. Для обеспечения заданного динамического диапазона используем три таких усилителя включённых каскадно. Коэффициент передачи каждого может быть равен 1, 2, 4, 8. Тогда диапазон изменения коэффициента передачи всех трёх усилителей изменяется от 1 до 29=512. Управление коэффициентами усиления микросхем DA3 – DA5 осуществляет микроконтроллер DD1 типа AT90S1200 фирмы Atmel. Для сжатия динамического диапазона сигнала используется дискретная система автоматической регулировки усиления (АРУ), анализирующая сигнал на выходе последнего усилителя и осуществляющая переключение коэффициента усиления, если уровень этого сигнала выходит за пределы диапазона 1 - 2 вольта. Напряжение с выхода третьего управляемого усилителя поступает на первый вход компаратора, который встроен в микроконтроллер DD1 (вывод 12). На второй вход этого же компаратора (вывод 13 микроконтроллера DD1) подается напряжение с ЦАП. Напряжение на выходе ЦАП может иметь только два значения, соответствующие верхнему значению (2 вольта), либо нижнему значению диапазона выходного сигнала (1 вольт). Управление работой ЦАП осуществляет микроконтроллер DD1, который вырабатывает соответствующие сигналы на выводах 14, 15, 16. Сначала на первый (старший) разряд ЦАП (резистор R14) подается напряжение +5В, а на второй разряд (резистор R12) – нулевое напряжение. При этом на втором входе компаратора формируется высокий уровень напряжения (2 вольта), который и сравнивается с напряжением на первом входе. |
Приглашения09.12.2013 - 16.12.2013 Международный конкурс хореографического искусства в рамках Международного фестиваля искусств «РОЖДЕСТВЕНСКАЯ АНДОРРА»09.12.2013 - 16.12.2013 Международный конкурс хорового искусства в АНДОРРЕ «РОЖДЕСТВЕНСКАЯ АНДОРРА»
|


Copyright © 2012 г.
При использовании материалов - ссылка на сайт обязательна.