 |
|
МЕНЮФестивали и конкурсы Семинары Издания О МОДНТ Приглашения Поздравляем НАУЧНЫЕ РАБОТЫ |
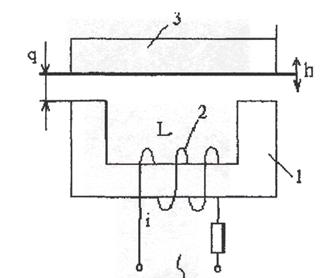
Дипломная работа: Исследование систем измерения траекторных параметров самолета при посадке на основе эффекта МессбауэраДля преобразования изменения индуктивности датчика в изменение силы тока, напряжения или частоты имеется ряд схем, которые можно разделить на резонансные, нерезонансные недифференциальные и дифференциальные.
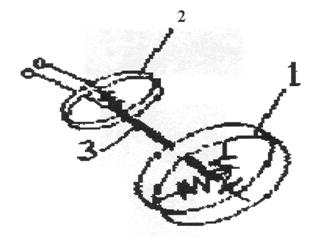
Рисунок 1.6 Схема индуктивного преобразователя 1 – сердечник; 2 – катушка; 3 – якорь; q – воздушный зазор; i – сила тока;L–коэффициент самоиндукции; h – перемещение якоря. Достоинства и недостатки индуктивных преобразователей. При выборе частоты питающего напряжения исходят из следующих соображений. Для уменьшения динамических погрешностей эта частота должна быть в 8-10 раз больше частоты измеряемой величины. Поскольку реактивное сопротивление датчика пропорционально частоте, то с повышением частоты увеличивается чувствительностьдатчика, но одновременно возрастают потери на гистерезис и вихревые токи и усиливается поверхностный эффект. Следовательно, имеется некоторое оптимальное значение частоты питающего напряжения, в пределах 600-800 гц и больше. Использование повышенной частоты переменного питающего напряжения приводят к уменьшению веса и габаритов при этих преобразованиях. Недостатком индуктивных преобразователей является наличие гальванической связи между питающим напряжением и сигналом на выходе. Для уменьшения погрешности преобразователи включаются по дифференциальным схемам. При определении магнитодвижущей силы (м.д.с.) катушки следует исходить из требований малой реакции электрической части датчика на его механическую часть и из малой реакции указателя на датчик (при заданной мощности указателя). Эта сила должна быть во много раз меньше измеряемого усиления, действующего на якорь, так как в противном случае появляются большие погрешности. Для устранения реакции указателя на датчик мощность датчика должна быть в 10-15 раз больше мощности указателя. [1.1] Сельсины Индуктивный преобразователь поворотный или вращающийся. При помощи сельсина сигнал курса снимается с вала гироскопа при измерении угла поворота. Сельсин состоит из двух частей: ротора и статора. Ротор жестко закреплен на измерительной оси гироскопа, а другая- статор может приводиться во вращение относительно корпуса прибора двигателем через редуктор с электромагнитной муфтой. Обычно, при измерении величин с помощью сельсинов используют пару преобразователей: сельсин- датчик и сельсин-приемник, которые электрически связаны между собой и при повороте ротора сельсин датчика синфазно и синхронно с ним поворачивается ротор сельсин приемника. Схема сельсина представлена на (рисунок 1.7). Погрешность сельсина при съеме информации с ГСОиН составляет 6-8.
Рисунок 1.7 1 – статор сельсина; 2 – ротор сельсина; 3 – ось гироскопа. Импульсины, индуктосины. Индукционные, цифровые преобразователи, имеющие ряд преимуществ перед емкостными, так как последние в значительной степени подвержены влиянию паразитных емкостей и посторонних электрический полей. Погрешность съема информации с ГСОиН составляет 1. Но при такой высокой точности измерения преобразователи имеют некоторые недостатки: очень дороги и сложны в изготовлении, достаточно сложны в настройке и поэтому не получают широкого распространения. Скт, Сквт. Индукционный преобразователь представляющий собой две круговые обмотки, с разными диаметрами, расположенные одна в другой. Одна обмотка закреплена на оси прибора и вращается относительно другой обмотки под действием измеряемой величины. Погрешность СКТ, СКТВ при съеме информации с ГСОиН составляет З-6. Оптические преобразователи. Для съема информации с ГСОиН возможно использовать оптические датчики: фотодетекторы, фотодиоды, фотоэлектронные умножители. Но габариты, масса, сложность настройки создают неудобства в использовании. Погрешность оптических датчиков составляет 1. Далее выясним, как погрешности метода съема информации с гироскопических систем ориентации и навигации влияют на собственные уходы (дрейф) гироскопа входящего в систему ориентации и навигации. Для этого опишем некоторые важные свойства гироскопа. Основой гироскопической системы ориентации и навигации является гироскоп. Гироскопом называется устройство, предназначенное для измерения углов, угловых скоростей, ускорений и стабилизации различных объектов , принцип работы которого основан на использовании поворотных ускорений. В настоящее время наибольшее распространение получили гироприборы с быстро вращающимся ротором, поэтому гироскопом часто называют быстро вращающееся симметричное тело, имеющее две или три степени свободы. Необходимое число степеней свободы может быть реализовано благодаря применению специальных подвесов. Основой подавляющего большинствасовременных гироскопических приборов является гироскоп в кардановом подвесе (рисунок 1.8).
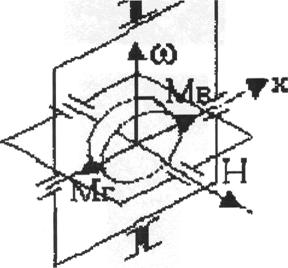
Рис.1.8 Схема гироскопа в кардановом подвесе Мг – гироскопический момент, Н – кинетический момент,
Кардановый подвес представляет собой две рамки со взаимно перпендикулярными осями вращения. Существует так же электростатический и магнитный подвес. Ось oZ, вокруг которой вращается ротор, называют главной осью гироскопа. Обычно стремятся, что бы оси oY, oX, oZ пересекались в одной точке. Если центр тяжести гироскопа совпадает с этой точкой, то он является астатическим, в противном случае гиромаятником или тяжелым гироскопом. При сложном движении диска относительно оси оХ будет возникать момент от инерционных сил Кориолиса, называющийся гироскопическим моментом Мг. Поскольку гироскопический момент является моментом инерционным, возникшим в результате движения быстро вращающегося диска с переносной угловой скоростью со то, согласно принципу Даламбера, он должен уравновешивать противоположно направленный ему внешний момент Мв т.е.
Угловая же скорость переносного вращения со есть результат действия внешнего момента Мв. Движение быстро вращающегося тела с угловой скоростью со под действием приложенного внешнего момента Мв называют прецессионным движением или прецессией. Когда диск совершает прецессионное движение, с угловой скоростью, вектор которой ш направлен под углом а к по отношению к вектору кинетического момента Hможно определить закон прецессии:
где
Мв - внешний момент; Н - Кинетический момент; Прецессионное движение направлено на совмещение вектора кинетического момента (собственный момент количества движения гироскопа) с вектором внешнего момента по кратчайшему пути. Кроме прецессионного движения существует другое движение, в процессе которого момент совершает работу, обеспечивающую увеличение энергии системы на величину энергии прецессии. Это дополнительное движение называется нутацией. Таким образом если к гироскопу приложен внешний момент Мв, то его главная ось совершает сложное движение, состоящее из прецессионного движения вокруг оси оХ, и наложенных на него дополнительных колебаний вокруг осей оХ и oY. Эти дополнительные движения главной оси гироскопа называют нутационными колебаниями или просто нутацией. Параметрами нутационных колебаний в общем случае являются их частота и амплитуды:
При вращающемся определим параметры нутационных колебаний:
Наиболее обширную группу представляют инструментальные погрешности гироскопов. Инструментальные погрешности - это погрешности возникающие из-за недостаточной точности и качества изготовления и сборки отдельных элементов и узлов гироскопа, несовершенства материалов и т.д. Вследствие этого относительно осей подвеса гироскопа возникают различные вредные моменты, которые будут вызывать неопределенное угловое движение главной оси гироскопа.
Этодвижение часто называют вредными уходами, собственными уходами или дрейфом гироскопа. Величина дрейфа гироскопа определяется следующим соотношением; Где
где Mm- моменты сухого трения в осях подвеса; Мнб- моменты от несбалансированности; Мmn- моменты от устройств обеспечивающих подвод питания к гироскопу исъем сигналов; М- прочие неучтенные моменты; Моменты сухого трения, создаваемые опорами подвеса гироскопа, - один из наиболее существенных факторов, вызывающих собственные уходы гироскопов. Приближенно предполагается, что моменты сухого трения не зависят от времени, угловой скорости, относительного перемещения, зависят от нагрузки на опору и меняют знак при изменении знака скорости относительно перемещения. В действительности, даже при сделанных допущениях характеристика момента трения не бывает симметричной, т.е. при изменении знака скорости относительно перемещения абсолютное значение момента трения не остается постоянным. Поэтому если даже полагать, что гироскоп установлен на объект, совершающий гармонические колебания, будет наблюдаться его односторонний уход. Моменты от несбалансированности возникают в результате несовпадения центра тяжести гироскопа с его неподвижной точкой. Эти моменты также могут носить случайный характер. Например, вследствие наличия в реальных конструкциях зазоров центр тяжести не имеет строго определенных координат. Статическую балансировку принципиально возможно произвести лишь с точностью до момента трения в опорах, на которых она производится, что определяется равенством Мт-Мнб. Моменты от устройств, обеспечивающих подвод питания к гироскопу и обеспечивающих съем сигналов, зависит от конструкции этих устройств, которая, в свою очередь, зависит от вида подводимой энергии. В приборах с электрическим питание они могут носить характер упругих моментов и моментов сухого трения и рассматривались выше. К числу неучтенных моментов можно отнести реактивные моменты при разгоне и торможении ротора, моменты, возникающие от инерционных сил при вибрациях в неравно жестких конструкциях и т.д. Необходимо упомянуть об уходах, возникающих за счет нутационных колебаний главной оси гироскопа, если она отклонена от перпендикуляра к плоскости наружной рамки. Причем скорость этого ухода тем больше, чем больше угол отклонения. Однако скорость этого ухода исчисляется сотыми долями градуса в час и учитывается только в прецизионных приборах. Ранее было выяснено, что
собственные уходы гироскопа определяются соотношением (1.7). Это соотношение
эквивалентно прецессионным уравнениям. Следовательно, при действии суммы
где
Мвр- вредные моменты; Н - кинетический момент. Угол отклонения главной оси гироскопа при этом определяется интегрированием угловой скорости прецессии:
где
Гироскоп сохраняет неизменной ориентацию своей главной оси впространстве с точностью до вредных уходов. Значит текущее значение путевого угла вычисляется по формуле:
где ПУтек.- текущее значение путевого угла; Пуист.- истинное значение путевого угла (курс); у- погрешность измерения путевого угла. Из этого видно, что уменьшение свободных уходов или дрейфа гироскопа возможно за счет уменьшения вредных моментов, за счет применения опор с малыми моментами трения, без моментных устройств подвода питания и высокоточных устройств съема сигналов.[1.2] 1.2.Эффект Мессбауэра, анализ возможностей применения эффекта Мессбауэра для измерения малых расстояний, скоростей и углов В 1958 г немецкий физик Рудольф Мессбауэр обнаружил в спектре у-излучения ядер, находящихся в
кристаллической решетке, несмещенную линию естественной ширины Г (линию без
отдачи). Наличие аналогичной линии в спектре поглощения естественным образом
привело к тому, что в кристаллической мишени, содержащей те же ядра, но в основном
состоянии, легко могли быть реализованы условия, при которых поглощение
у-квантов носило преимущественно резонансный характер. При этом очевидно, что
низколежащим возбужденным уровням ядер (с энергией порядка десятков кэв ),
для которых характерно большое время жизни, должен соответствовать чрезвычайно
острый резонанс шириной близкой к 2Г. Таким образом, возникла возможность
получения очень узких линий и одновременно детектора с необычайно высокой
разрешающей способностью, характеризуемой отношением Г7Е (Е-энергия Сущность эффекта
Мессбауэра заключается в том, что между радиоактивным изотопом (излучателем) и
мишенью (поглотителем), выполненных из ядер одного и того же рода, будет
происходить резонансное поглощение
где n- единичный вектор в направлении
распространения - Если ядро свободно и
первоначально покоится, то энергия
где Е-энергия Для резонансного
поглощения покоящимся ядром, необходимо, чтобы энергия
Все экспериментальные методы исследования резонансного поглощения -квантов до открытия эффекта Мессбауэра основывались на компенсации энергии отдачи за счет доплеровского смещения (или уши рения) линии. Однако вследствие большой величины скорости v эти методы были мало эффективны, и очень заманчивое резонансное поглощение, соответствующее долгоживущим ядерным уровням, могло быть использовано только для узкого круга чисто ядерных задач. Включение атомов
излучателя и поглотителя в кристаллическую решетку позволило избежать потери
энергии
Рис 1.9 Схема внедрения ядра в Кристаллическую решетку Импульс отдачи (1.12),
который неизбежно приобретается ядром, приводит к возбуждению фононов в
кристалле. При этом импульс фонона (или суммарный импульс фононов) не должен в
общем случае совпадать с (1.12), так как часть импульса может быть передана
кристаллу как целому. Такая передача импульса в силу большой массы кристалла,
очевидно, не сопровождается передачей энергии. Следовательно, передаваемая
кристаллу энергия АЕ при распаде перестает коррелировать с передаваемым
импульсом и может быть произвольной. В частности, АЕ может равняться нулю, и
весь импульс отдачи (1.12) передается кристаллу как целому. (Заметим, что
утверждение, согласно которому АЕ-0 всякий раз, когда импульс отдачи
воспринимает весь кристалл, в общем случае не верно.) При этом линия излучения
(поглощения) оказывается несмещенной, и мы приходим к эффекту Мессбауэра. При
этом относительная ширина резонансных линий поглощения чрезвычайно узкая (порядка |
Приглашения09.12.2013 - 16.12.2013 Международный конкурс хореографического искусства в рамках Международного фестиваля искусств «РОЖДЕСТВЕНСКАЯ АНДОРРА»09.12.2013 - 16.12.2013 Международный конкурс хорового искусства в АНДОРРЕ «РОЖДЕСТВЕНСКАЯ АНДОРРА»
|
 - амплитуды нутации;
- амплитуды нутации; (1.10)
(1.10)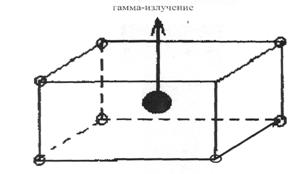


Copyright © 2012 г.
При использовании материалов - ссылка на сайт обязательна.