 |
|
МЕНЮФестивали и конкурсы Семинары Издания О МОДНТ Приглашения Поздравляем НАУЧНЫЕ РАБОТЫ |
Дипломная работа: Исследование систем измерения траекторных параметров самолета при посадке на основе эффекта МессбауэраПри измерении угловых
координат источника используют прямолинейность распространения
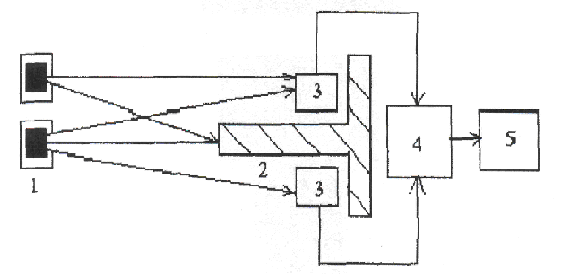
Рисунок 1.13 Схема измерения углов. 1 – излучатель; 2 – компилятор; 3 – приемник; 4 – преобразователь; 5 – измеритель 1.3 Разработка устройства съема информации с гироскопических систем ориентации и навигации на основе эффекта Мессбауэра Разработку устройства
съема информации с гироскопических систем ориентации и навигации будем
осуществлять на основе (описанного ранее смотриподробней 1.2.) эффекта
Мессбауэра. Для измерения угла отклонения источника и приемника друг
относительно друга будем использовать (смотриподробней1.2.) метод пропускания
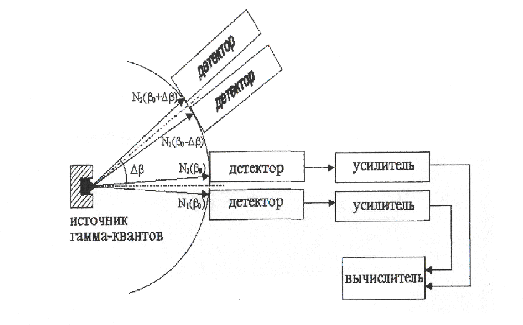
резонансных Функциональная схема
устройства съема информации на основе эффекта Мессбауэра представлена на рисунке
1.14. Для измерения угловых координат возможно использование одного детектора
(прямой метод), но для повышения точности информации о положении источника
будем использовать два детектора (метод сравнения). Если относительное
перемещение источника и детекторов равно нулю (рисунок 1.14) то детекторы
зарегистрируют максимальную скорость счета
Рисунок 1.14 Функциональная схема устройства съема информации с ГСОиН на основе эффекта Мессбауэра
Рассматриваемый принцип измерения угловых координат основан на амплитудном методе пеленгации. Опишем сначала прямой метод измерения, В этом случае, когда линия визирования на детектор проходит через максимум излучения, на приемнике фиксируется максимальный сигнал:
гдеk0 - коэффициент пропорциональности; N(0)- максимальное
значение скорости счета При отклонении линии визирования от максимума излучения на угол Ар выходной сигнал равен:
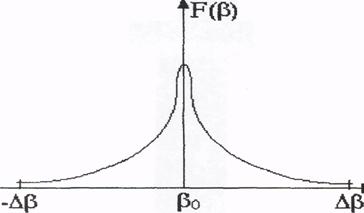
Пеленгационная
характеристика, полученная экспериментальным путем и показывающая зависимость
скорости счета
Рисунок 1.15 пеленгационнаяхарактеристика. Математически пеленгационную характеристику можно описать в следующем виде:
Максимальное значение скорости
счета
гдеNmax - максимальная скорость счета у -квантов; R - расстояние между источником и детектором;
s - эффективная площадь детектора; а - активность источника;
3.7*1010 - число актов распада в одну секунду. Для нашей разработки в
качестве источника гамма - квантов выбираем ядро 60Со, внедренное в
кристаллическую решетку In.
Детекторами служат два сцинтилляторных счетчика с кристаллом NaI(Tl). В нашем случае расстояние между источником и детекторами
составляет 4.5см. В условиях малых расстояний активность источника
должна быть минимальной, поэтому наиболее приемлемой является активность
источника а=1*10-10 кюри. Детекторы являются точечной целью, поэтому
эффективная площадь детектора 8=0.1см. Детекторы в условиях малых энергий имеют
незначительные габариты, и их размещение не создает неудобств. Источник Определим пеленгационную чувствительность измерителя:
Диаграмму направленности излучения можно аппроксимировать кривой:
где
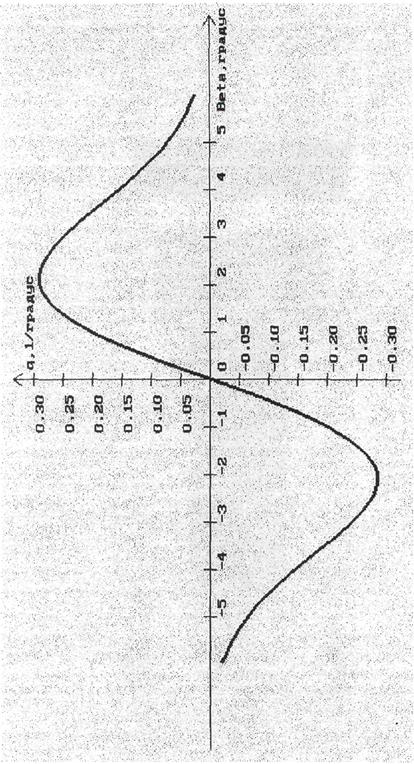
где Для построения пеленгационной чувствительности была разработана программа [смотри приложение]. Результаты работы программы представлены на рисунке1.16.
Рисунок 1.6 График пеленгационнои чувствительности Поскольку работа ГСОиН
производится на малых углах (от -1°- 1°), то исходя из полученной
пеленгационнои чувствительности видно, что этот участок является линейным
участком нелинейной характеристики, следовательно Увеличение эффективности
процесса измерения связано с использованием метода сравнения, что предполагает
наличие двух детекторов излучения. Принцип работы устройства, основанного на
этом методе, аналогичен приведенному. В условиях резонанса детекторы
относительно источника находятся на равносигнальном направлении и сигналы на их
входе будут одинаковыми. При отклонении равносигнального направления от
максимума на угол
S1, S2 - сигналы на первом и втором детекторах. Пеленгационная характеристика, пропорциональная углу отклонения, для метода сравнения имеет вид:
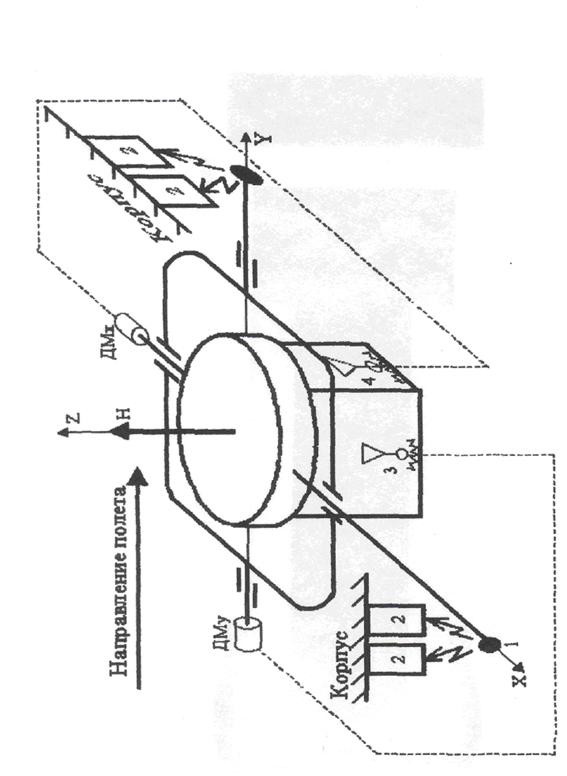
Разработанное устройство съема информации основывается на методе сравнения энергии сигналов. Устройство измерения угловых координат не является следящим и реализуется при отношении сигнал шум значительно превышающем единицу. Поэтому с выхода схемы сравнения и после усиления полученная информация о величине угла отклонения подается на индикаторы или в систему управления летательным аппаратом (ЛА). Канал управления ЛА не входит в задачу дипломного проекта и поэтому не рассматривается. Функциональная схема гироскопа для ГСОиН с разработанным устройством представлена на рисунке 1.18.
Рисунок 1.18 Функциональная схема гироскопа для ГСОиН с разработанным устройством. 1 – источник гамма-квантов; 2 – детектор, ДМх, ДМу – датчикимоментов по осям; 3,4 – маятники ГСОиН в своей структуре содержит гироскоп в кардановом подвесе. Такие гироскопы, в большинстве случаев используются для измерения: 1) курса, 2) углов крена, тангажа, 3) углов поворота объекта. Практически в конструкции гироскопа могут быть предусмотрены специальные моментные устройства (датчики моментов ДМх и ДМу), назначение которых заключается в том, чтобы устанавливать главную ось гироскопа oZ в требуемое положение. Перед запуском главная ось гироскопа должна быть соответствующим образом ориентирована относительно объекта или в пространстве. При решении задачи начальной ориентации (коррекции) гироскопических систем углы отклонения составляют то -1°-1°. Предположим, что гироскоп в момент пуска ориентирован относительно объекта (ЛА) и является датчиком курсового угла. В силу рассмотренных в подразделе 1.1. свойств гироскоп будет сточностью до вредных уходов сохранять неизменным, направление своейточностью до вредных уходов сохранять неизменным , направление своей главной оси в абсолютном инерциальном пространстве. Если летательный аппарат (ЛА), под действием каких либо причин, изменит, например, угол курса (тангажа и т.д.) по сравнению с заданным, или в силу действия вредных моментов (дрейфа), то происходит угловое перемещение внешней рамки карданового подвеса относительно оси У. Маятник 4 выдает сигнал об этом отклонении и после его усиления подается на датчик моментов по оси X (ДМх), прикладывая момент к внутренней рамке подвеса. В результате действия момента по оси X датчик вертикали 3 зарегистрирует отклонение. Указанное отклонение составляет 1-10 . После усиления сигнал будет подан на датчик момента по оси У (ДМу), что заставит повернуться внутреннюю рамку в исходное положение. Таким образом рамки карданового подвеса гироскопа будут ориентированы друг относительно друга под углом 90°. Источники Достоинства и недостатки разработанного устройства. Предложенный метод съема информации может применяться в датчиках вертикали с целью уменьшения зоны застоя и других вредных характеристик этого датчика влияющих на относительную ориентацию рамок гироскопа. В то же время указанный
метод при определенных условиях может быть использован в датчиках съема
информации по углам крена, тангажа, курса. Здесь существует два способа
использования 1) Точного измерителя в случае применения грубого и точного каналов; 2) Автономного измерителя, что требует дополнительного исследования областиприменения эффекта Мессбауэра. Применение данного устройства позволяет убрать вредные моменты отустройств съема сигналов (что значительно уменьшает дрейф гироскопа), и позволяет с чрезвычайной точностью измерять угловые координаты объекта, что имеет огромное значение для решения задач ориентации и навигации. Разработанное устройство обладает следующими основнымипреимуществами: - структура гамма-поля имеет высокую стабильность во времени; - высокая направленность и относительно небольшая дальность действия сводят кминимуму помехи соседних систем; - система обладает исключительно высокой надежностью, т.к. основная ее часть -источник излучения, почти абсолютно стабилен ( излучает 5 лет), относительнодешев, а детектор потребляет малую мощность. Основным недостатком подобных устройств следует считать их радиационную опасность. Но выбранная нами активность источника (1-10-3 кюри) позволит удовлетворить требования радиационной безопасности при эксплуатации устройства без применения различных устройств защиты(экранов, коллиматоров и т.д.). Все же необходимо учитывать радиационную опасность при монтаже и профилактическом обслуживании, замене источников и т.д. Все это создает эмоциональную напряженность операторов (летчиков, экипаж), а так же людей занимающихся обслуживанием этих систем. ЗАКЛЮЧЕНИЕ Тема дипломного проекта: "Исследование систем измерения траекторных параметров самолета при посадке на основе эффекта Мессбауэра". Настоящий дипломный
проект, посвящен разработке и исследованию Предлагаемое устройство съема информации, в отличие от традиционных датчиков съема (потенциометрических, емкостных, индуктивных и т.д.), имеют ряд преимуществ: - уменьшение зоны застоя, дрейфа и других вредных характеристик,воздействующих на рамки гироскопа для ГСОиН. - позволяет с чрезвычайной точностью осуществлять съем информации с ГСОиН,что имеет огромное значение для решения задач ориентации и навигации. - структура гамма-поля имеет высокую стабильность во времени; - высокая направленность и относительно небольшая дальность действия сводятк минимуму помехи соседних систем; - система обладает исключительно высокой надежностью, т.к. основная ее часть -источник излучения, почти абсолютно стабилен (излучает 5 лет), относительно дешев, а детектор потребляет малую мощность. Основным недостатком подобных устройств следует считать их радиационную опасность. Но выбранная нами активность источника (1-10-3 кюри ) позволит удовлетворить требования радиационной безопасности при эксплуатации устройства без применения различных устройств защиты(экранов, коллиматоров и т.д.). Указанный метод при
определенных условиях может быть использован вдатчиках съема информации по
углам крена, тангажа, курса. Здесь существует дваспособа использования 1)Точного измерителя в случае применения грубого и точного каналов; 2) Автономного измерителя, что требует дополнительного исследования областиприменения эффекта Мессбауэра. Приложение. Листинг программы Program Diplom; Uses Graph; Const Beta_0_5 = 2.5; Var q Real; Beta Real; i Integer; GrDriver Integer; GrMode Integer; ErrCode Integer; MaxX Integer; MaxY Integer; StringV String/begin GrDriver:=VGA; GrMode :=VGAMed; InitGraph (GrDriver,GrMode,T>:\TP6\BGI\T); ErrCode:=GraphResult; if (ErrCode <> grOK) then begin WriteLn ('Ошибкаграфики: *, GraphErrorMsg (ErrCode) ) ; Halt (1) end; SetBkColor (Blue); SetColor (LightCyan); MaxX:=GetMaxX; MaxY:=GetMaxY; Line (MaxX div 2+2,10,MaxX div 2+2,MaxY-10); OutTextXY (MaxX div 2+11,20 Дградус1); Line (10,MaxY div 2+3,MaxX-10,MaxY div 2+3); OutTextXY (MaxX-90,MaxY div2+10,*Beta, 1/градус*); Line (MaxX div 2-3,17,MaxX div 2+2,10); Line (MaxX div 2+7,17,MaxX div 2+2,10); Line (MaxX-lO.MaxY div 2+3,MaxX-18,MaxY div 2-2); Line (MaxX-lO.MaxY div 2+3,MaxX-18,MaxY div 2+8); for i:=-5 to 5 do begin Line (MaxX div 2+2+iMO, MaxY div 2-2,MaxX div 2+2+iA40,MaxY div 2+8); Str(i:2,StringV); OutTextXY (MaxX div 2+2+iMO.MaxY div 2+10, StringV) end; for i:=-6 to 6 do begin Line (MaxX div 2-3,Trunc(MaxY div 2+1*25+3), MaxX div 2+7,Trunc(MaxY div 2+1*25+3)); Str(-l*0.05:4:2,StrlngV); if (i<0) then OutTextXY(MaxX div 2-42,Trunc(MaxY div 2+iA25+5),StringV) ; if(i>0)then OutTextXY(MaxX div 2+9,Trunc(MaxY div 2+i*25+5),StringV); end; SetCoior (LightRed); SetLineStyle (0,0,3) ; Beta:=-6; I:=1 Repeat q:=(1.4*Beta*Exp(- 0.7ASqr(Beta/BetaJ)_5))/Sqr(Beta_p_5)); Beta:==Beta+0.1; if(i=l)then MoveTo(Trunc(MaxX div 2+Beta*40),Trunc(MaxY div 2-q*500)+2) else LineTo(Trunc(MaxX div 2+Beta*40),Trunc(MaxY div 2-q*500)+2); Inc(i) Until (Beta >6) ; ReadLn; end. |
Приглашения
09.12.2013 - 16.12.2013
Международный конкурс хореографического искусства в рамках Международного фестиваля искусств «РОЖДЕСТВЕНСКАЯ АНДОРРА»
09.12.2013 - 16.12.2013
Международный конкурс хорового искусства в АНДОРРЕ «РОЖДЕСТВЕНСКАЯ АНДОРРА»

